
─┐õø
Č■Īó╩ųäė(d©░ng)┐žųŲ▓Į▀M(j©¼n)ļŖÖC(j©®)ą²▐D(zhu©Żn)ĘĮŽ“║═╦┘Č╚
╚²Īó├³┴Ņ▀\(y©┤n)äė(d©░ng)▌S▐D(zhu©Żn)ęįųĖČ©Ą─╦┘Č╚▀\(y©┤n)äė(d©░ng)ĄĮ╦∙ąĶĄ─╬╗ų├
╦─ĪóCPUĄ¶ļŖųžåó║¾▒Ż│ų▀\(y©┤n)äė(d©░ng)┐žųŲĄ─«ö(d©Īng)Ū░╬╗ų├
Ū░├µįö╝Ü(x©¼)ųv╩÷┴╦▀\(y©┤n)äė(d©░ng)┐žųŲŽ“?q©▒)¦Ą─┼õų├║═▀\(y©┤n)äė(d©░ng)┐žųŲųĖ┴ŅĄ─╩╣ė├ĘĮĘ©Ż¼ĮėŽ┬üĒ(l©ói)ę¬ųvĄ─╩Ū║å(ji©Żn)å╬│╠ą“Ą─ŠÄīæ║═š{(di©żo)įćĪŻ
į┌ŠÄīæ│╠ą“Ģr(sh©¬)Ż¼ąĶę¬ūóęŌĄ─╩ŪūįČ©┴xĄ─Ę¹╠¢(h©żo)║═ĄžųĘ▓╗─▄┼c▀\(y©┤n)äė(d©░ng)┐žųŲŽ“?q©▒)¦Ęų┼õĄ─┤µā?ch©│)Ų„ø_═╗ĪŻ
ę╗Īó▄øė▓╝■ĮM│╔
1Īó▄ø╝■Ż║STEP-7-Micro/WIN SMART▄ø╝■Ż╗
2Īóė▓╝■Ż║╬„ķTūėS7-200 SMART ST40 PLCĪó57▓Į▀M(j©¼n)ļŖÖC(j©®)║═“ī(q©▒)äė(d©░ng)Ų„Ż©DM542Ż®ĪŻ
Č■Īó╩ųäė(d©░ng)┐žųŲ▓Į▀M(j©¼n)ļŖÖC(j©®)ą²▐D(zhu©Żn)ĘĮŽ“║═╦┘Č╚
Š▀¾w▓Į¾E╚ńŽ┬Ż║
1Īó×ķ╩ųäė(d©░ng)┐žųŲ─Ż╩Įīæ╚ļ▀\(y©┤n)äė(d©░ng)╦┘Č╚Ż©į┌│╠ą“▀\(y©┤n)äė(d©░ng)▀^(gu©░)│╠ųąę▓┐╔═©▀^(gu©░)ĀŅæB(t©żi)łDś╦(bi©Īo)▀M(j©¼n)ąąą▐Ė─Ż®Ż╗
2Īóš{(di©żo)ė├Ī░AXISx_CTRLĪ▒ųĖ┴Ņåóė├║═│§╩╝╗»▀\(y©┤n)äė(d©░ng)▌SŻ╗
Ī░AXISx_CTRLĪ▒ųĖ┴ŅĄ─Ī░MOD_ENĪ▒ģóöĄ(sh©┤)▒žĒÜķ_åóŻ¼▓┼─▄åóė├Ųõ╦¹▀\(y©┤n)äė(d©░ng)┐žųŲųĖ┴ŅŽ“▀\(y©┤n)äė(d©░ng)▌S░l(f©Ī)╦═├³┴ŅŻ¼╚ń╣¹ģóöĄ(sh©┤)ĻP(gu©Īn)ķ]Ż¼▀\(y©┤n)äė(d©░ng)▌SĢ■(hu©¼)ųąų╣╦∙ėąš²į┌▀M(j©¼n)ąąĄ─├³┴ŅŻ¼ę“┤╦į┌│╠ą“╩╣ė├╩╝ĮKĮė═©Ą─Ī░SM0.0Ī▒╩╣─▄įōųĖ┴ŅĪŻ
3Īóš{(di©żo)ė├Ī░AXISx_MANĪ▒ųĖ┴Ņīó▀\(y©┤n)äė(d©░ng)▌S┼õų├×ķ╩ųäė(d©░ng)┐žųŲŻ¼╩╣ė├įōųĖ┴Ņį╩įS▓Į▀M(j©¼n)ļŖÖC(j©®)░┤šš▓╗═¼Ą─╦┘Č╚▀\(y©┤n)ąąŻ¼╗“čžš²Ž“╗“žō(f©┤)Ž“┬²▀M(j©¼n)ĪŻ
į┌╩╣ė├įōųĖ┴ŅĢr(sh©¬)═¼ę╗Ģr(sh©¬)ķgāH─▄åóė├RUNĪóJOG_PĪóJOG_N▌ö╚ļų«ę╗ĪŻ
į┌ļŖÖC(j©®)▀\(y©┤n)ąąĢr(sh©¬)┐╔ęį═©▀^(gu©░)Ė³Ė─SpeedŻ©╦┘Č╚Ż®ģóöĄ(sh©┤)ą▐Ė─▓Į▀M(j©¼n)ļŖÖC(j©®)Ą─▀\(y©┤n)ąą╦┘Č╚Ż¼Ą½DirŻ©ĘĮŽ“Ż®ģóöĄ(sh©┤)Ż¼▒žĒÜ▒Ż│ų×ķ│ŻöĄ(sh©┤)Ż¼╝┤▓Į▀M(j©¼n)ļŖÖC(j©®)═Żų╣║¾▓┼─▄š{(di©żo)š¹ą²▐D(zhu©Żn)ĘĮŽ“ĪŻ
╠žäeąĶę¬ūóęŌĄ─╩ŪŻ¼į┌š¹éĆ(g©©)│╠ą“ųąŻ¼Ī░AXISx_MANĪ▒ųĖ┴Ņų╗─▄│÷¼F(xi©żn)ę╗┤╬Ż¼«ö(d©Īng)ąĶę¬ČÓ┤╬š{(di©żo)ė├įōųĖ┴ŅĢr(sh©¬)Ż¼┐╔ęį═©▀^(gu©░)ūė│╠ą“▀M(j©¼n)ąąš{(di©żo)ė├ĪŻ
╠▌ą╬łD│╠ą“╚ńłD1╦∙╩ŠĪŻ AXIS0_MANųĖ┴Ņ
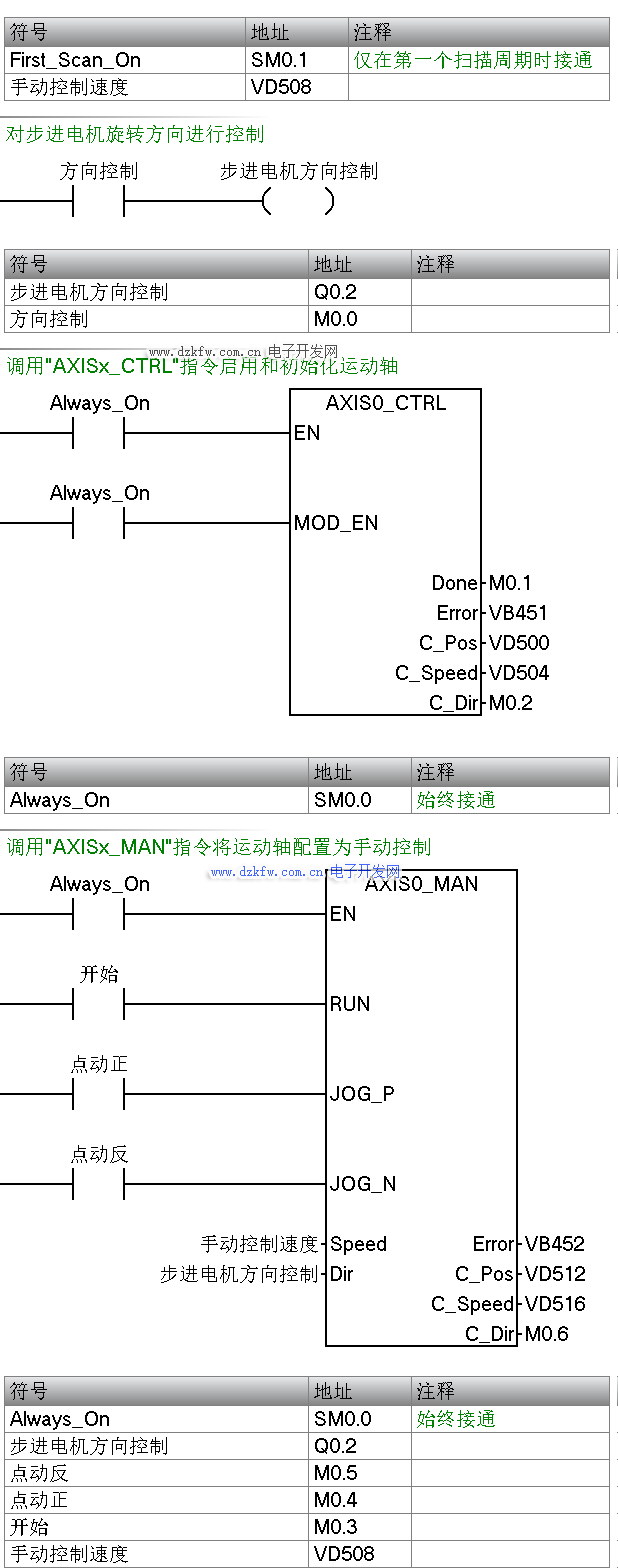
łD1 │╠ą“1
╚²Īó├³┴Ņ▀\(y©┤n)äė(d©░ng)▌S▐D(zhu©Żn)ęįųĖČ©Ą─╦┘Č╚▀\(y©┤n)äė(d©░ng)ĄĮ╦∙ąĶĄ─╬╗ų├
Š▀¾w▓Į¾E╚ńŽ┬Ż║
1Īóš{(di©żo)ė├Ī░AXISx_CTRLĪ▒ųĖ┴Ņåóė├║═│§╩╝╗»▀\(y©┤n)äė(d©░ng)▌SŻ╗
Ī░AXISx_CTRLĪ▒ųĖ┴ŅĄ─Ī░MOD_ENĪ▒ģóöĄ(sh©┤)▒žĒÜķ_åóŻ¼▓┼─▄åóė├Ųõ╦¹▀\(y©┤n)äė(d©░ng)┐žųŲųĖ┴ŅŽ“▀\(y©┤n)äė(d©░ng)▌S░l(f©Ī)╦═├³┴ŅŻ¼╚ń╣¹ģóöĄ(sh©┤)ĻP(gu©Īn)ķ]Ż¼▀\(y©┤n)äė(d©░ng)▌SĢ■(hu©¼)ųąų╣╦∙ėąš²į┌▀M(j©¼n)ąąĄ─├³┴ŅŻ¼ę“┤╦į┌│╠ą“╩╣ė├╩╝ĮKĮė═©Ą─Ī░SM0.0Ī▒╩╣─▄įōųĖ┴ŅĪŻ
2Īóš{(di©żo)ė├Ī░AXISx_GOTOĪ▒ųĖ┴Ņ├³┴Ņ▀\(y©┤n)äė(d©░ng)▌SęįųĖČ©╦┘Č╚▀\(y©┤n)äė(d©░ng)ĄĮ╦∙ąĶ╬╗ų├ĪŻ
═©▀^(gu©░)Pos║═SpeedģóöĄ(sh©┤)įO(sh©©)ų├▀\(y©┤n)äė(d©░ng)Ą─╦┘Č╚║═╬╗ų├Ż¼┐╔ęį×ķČ©ųĄ╗“ūā┴┐Ż¼╩╣ė├ūā┴┐┐╔į┌š{(di©żo)įćĢr(sh©¬)▀M(j©¼n)ąąą▐Ė─ĪŻį┌įō─Ż╩ĮŽ┬Ż¼▓Į▀M(j©¼n)ļŖÖC(j©®)Ą─ą²▐D(zhu©Żn)ĘĮŽ“ė╔PosģóöĄ(sh©┤)Ą─š²žō(f©┤)┤_Č©ĪŻ
ModeģóöĄ(sh©┤)▀xō±ęŲäė(d©░ng)Ą─ŅÉą═Ż║
0Ż║Į^ī”(du©¼)╬╗ų├
1Ż║ŽÓī”(du©¼)╬╗ų├
2Ż║?ji©Żn)╬╦┘▀B└m(x©┤)š²Ž“ą²▐D(zhu©Żn)
3Ż║?ji©Żn)╬╦┘▀B└m(x©┤)Ę┤Ž“ą²▐D(zhu©Żn)
╚¶ModeģóöĄ(sh©┤)įO(sh©©)ų├×ķ0Ż¼ät▒žĒÜ╩ūŽ╚╩╣ė├AXISx_RSEEK╗“AXISx_LDPOSųĖ┴ŅĮ©┴ó┴Ń╬╗ų├ĪŻ
╠▌ą╬łD│╠ą“╚ńłD2╦∙╩ŠĪŻ
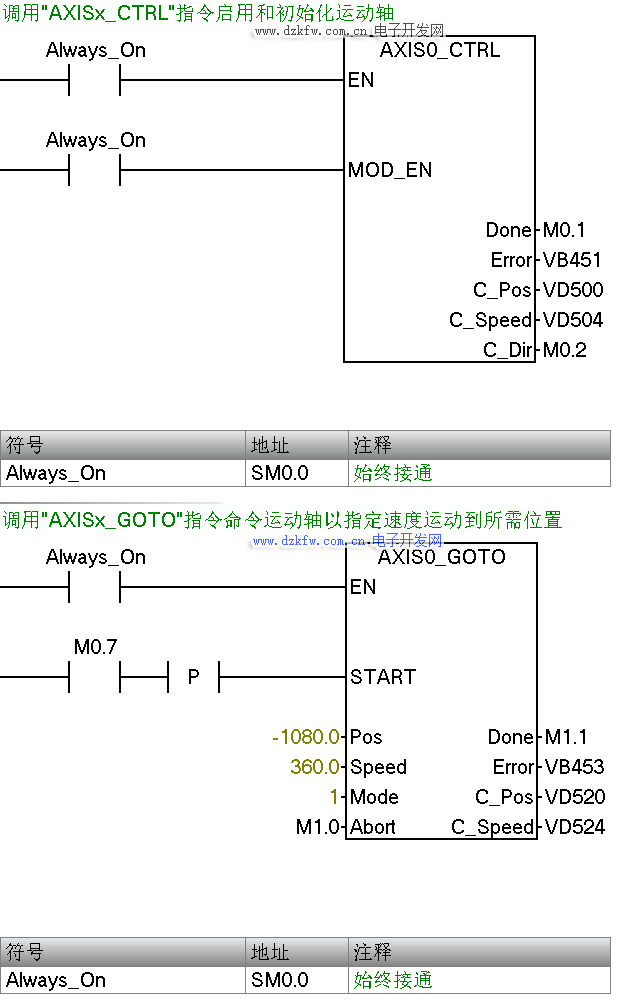
łD2 │╠ą“2
╦─ĪóCPUĄ¶ļŖųžåó║¾▒Ż│ų▀\(y©┤n)äė(d©░ng)┐žųŲĄ─«ö(d©Īng)Ū░╬╗ų├
ę“?y©żn)ķ╬„ķTūėS7-200 SMART PLCĄ¶ļŖųžåó║¾ė├ė┌│§╩╝╗»ųĖ┴ŅĄ─ł╠(zh©¬)ąąŻ¼«ö(d©Īng)Ū░╬╗ų├Ģ■(hu©¼)Å═(f©┤)╬╗×ķ0Ż¼ę“┤╦ąĶę¬═©▀^(gu©░)│╠ą“╩╣CPUĄ¶ļŖųžåó║¾▒Ż│ų▀\(y©┤n)äė(d©░ng)┐žųŲĄ─«ö(d©Īng)Ū░╬╗ų├Ż¼Š▀¾w▓Į¾E╚ńŽ┬Ż║
1Īóį┌ĒŚ(xi©żng)─┐śõųąļpō¶CPUŻ¼į┌ÅŚ│÷Ą─ŽĄĮy(t©»ng)ēKųą▀xō±Ī░▒Ż│ųĘČć·Ī▒Ż¼įO(sh©©)ų├ā╔éĆ(g©©)öÓļŖ▒Ż│ųģ^(q©▒)ė“Ż║VD1000ĪóVD1004Ż¼╚ńłD3║═łD4╦∙╩ŠŻ╗
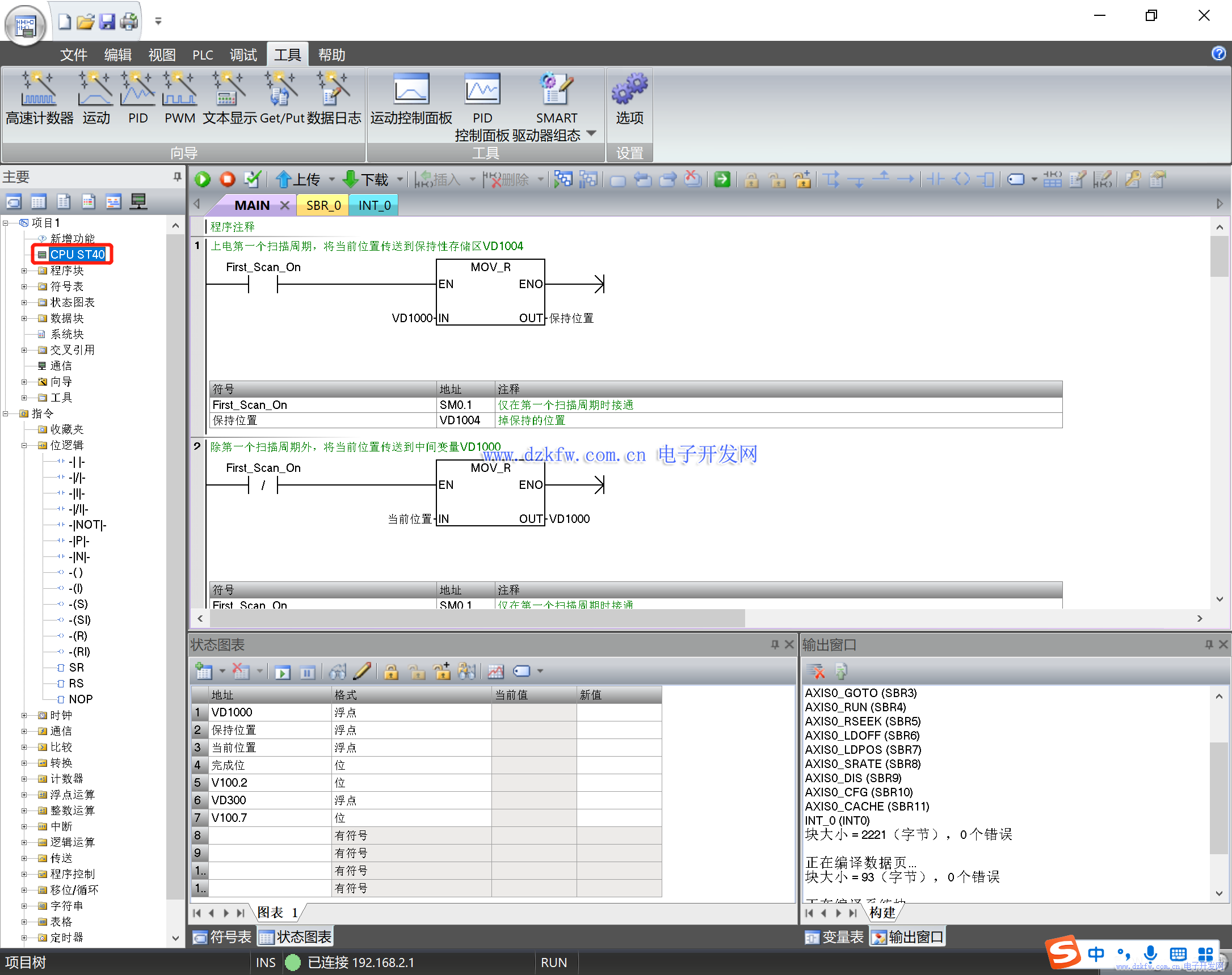
łD3 ▀xō±CPUŽĄĮy(t©»ng)ēK
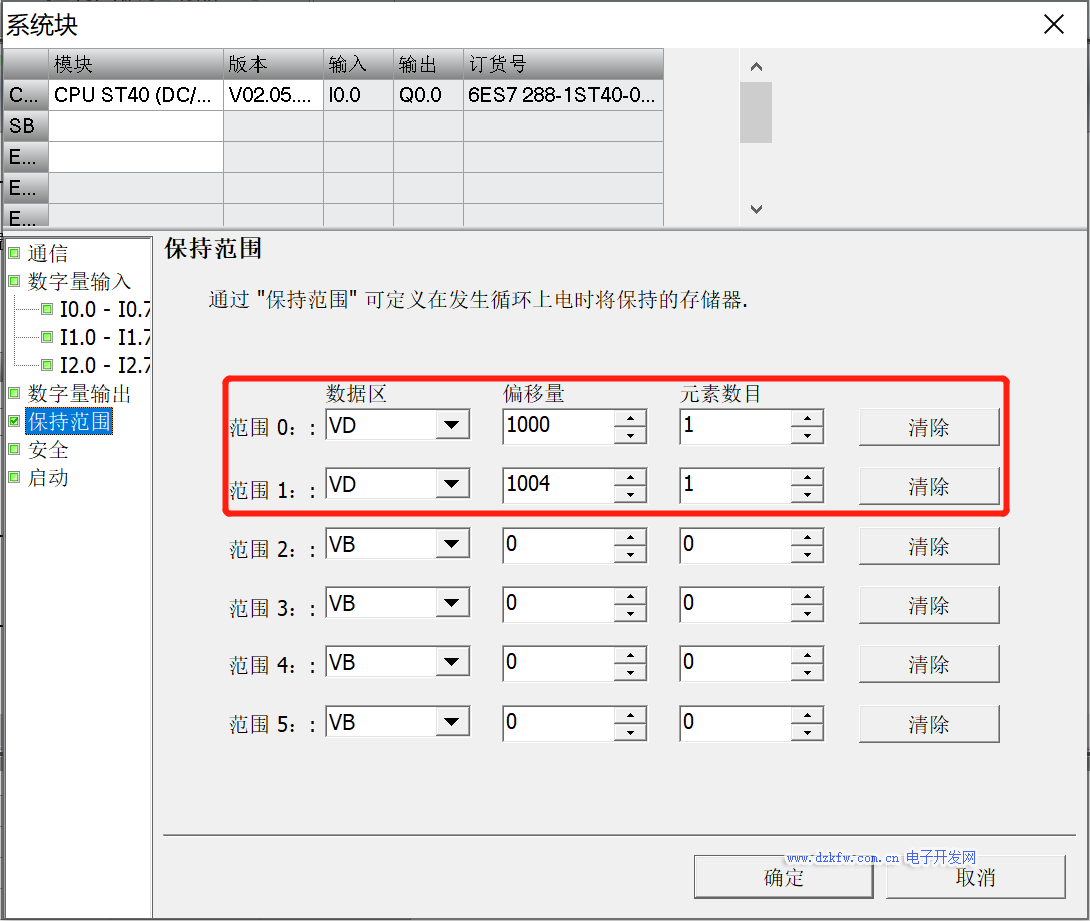
łD4 įO(sh©©)ų├öÓļŖ▒Ż│ųģ^(q©▒)ė“
2Īóīó«ö(d©Īng)Ū░╬╗ų├ųĄį┌Ą┌ę╗éĆ(g©©)Æ▀├Ķų▄Ų┌ā╚(n©©i)é„╦═ĄĮ▒Ż│ų╬╗ų├VD1004ā╚(n©©i)Ż¼į┌│²Ą┌ę╗éĆ(g©©)Æ▀├Ķų▄Ų┌═Ōīó«ö(d©Īng)Ū░╬╗ų├ųĄé„╦═ĄĮ▒Ż│ų╬╗ų├VD1000ā╚(n©©i)Ż¼╚ńłD5╦∙╩ŠŻ╗

łD5 ī”(du©¼)ūā┴┐▀M(j©¼n)ąą╠Ä└Ē
3Īóė├│§╩╝╗»ųĖ┴Ņ"AXIS0_CTRL"ī”(du©¼)▀\(y©┤n)äė(d©░ng)▌S▀M(j©¼n)ąą│§╩╝╗»Ż¼╚ńłD6╦∙╩ŠŻ╗
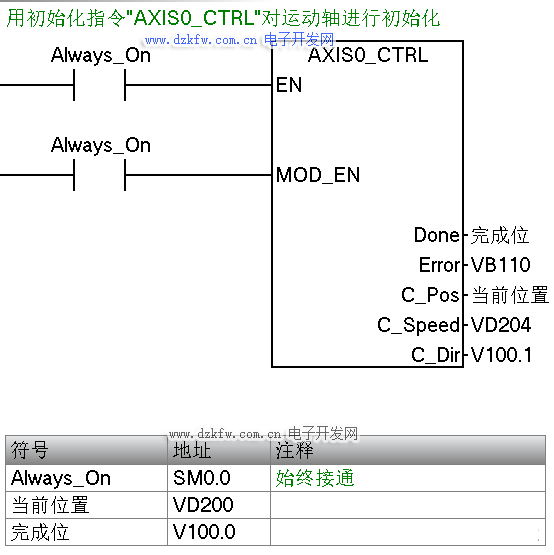
łD6 ▀\(y©┤n)äė(d©░ng)▌S│§╩╝╗»
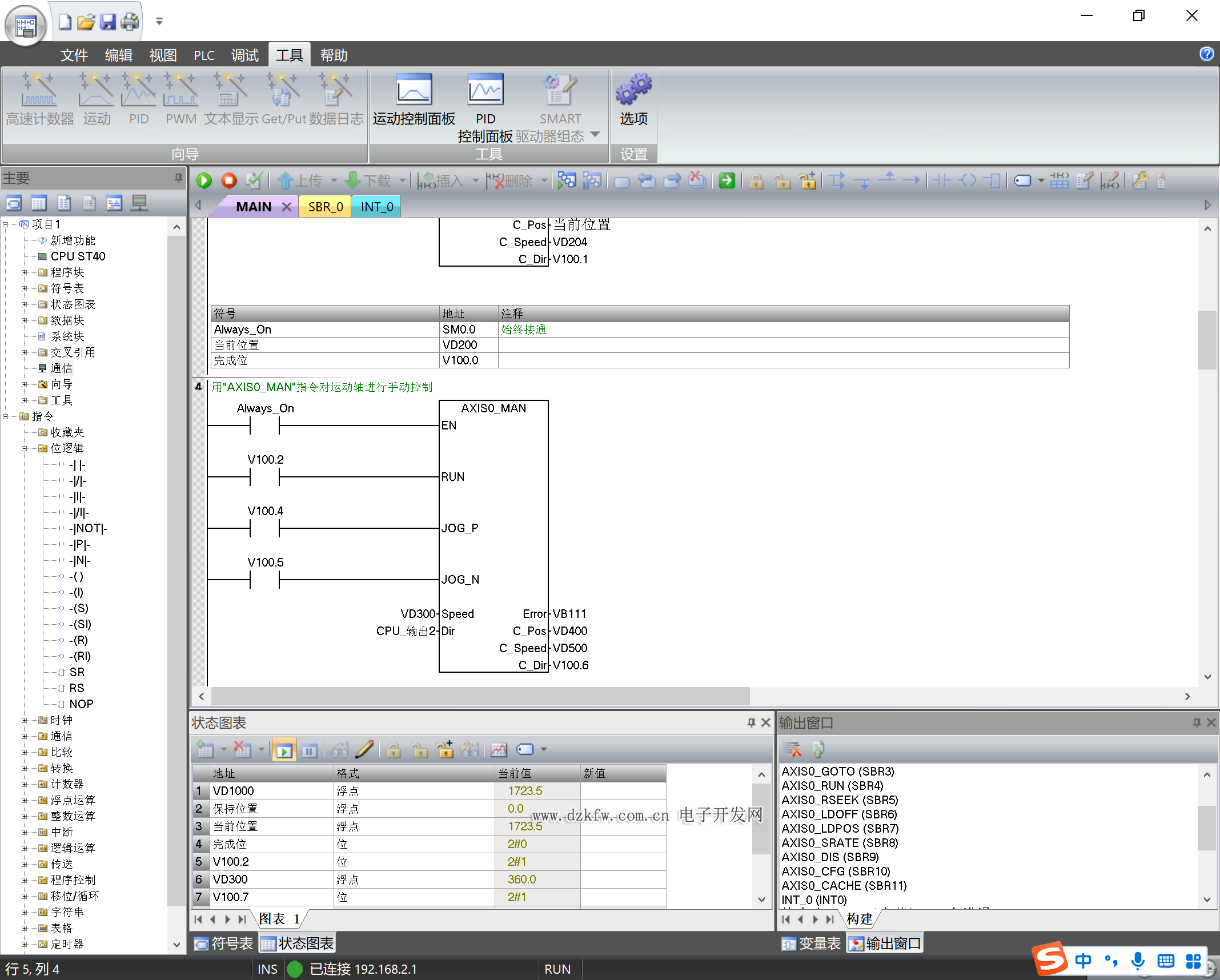
4Īóė├"AXIS0_MAN"ųĖ┴Ņī”(du©¼)▀\(y©┤n)äė(d©░ng)▌S▀M(j©¼n)ąą╩ųäė(d©░ng)┐žųŲŻ¼╚ńłD7╦∙╩ŠŻ╗
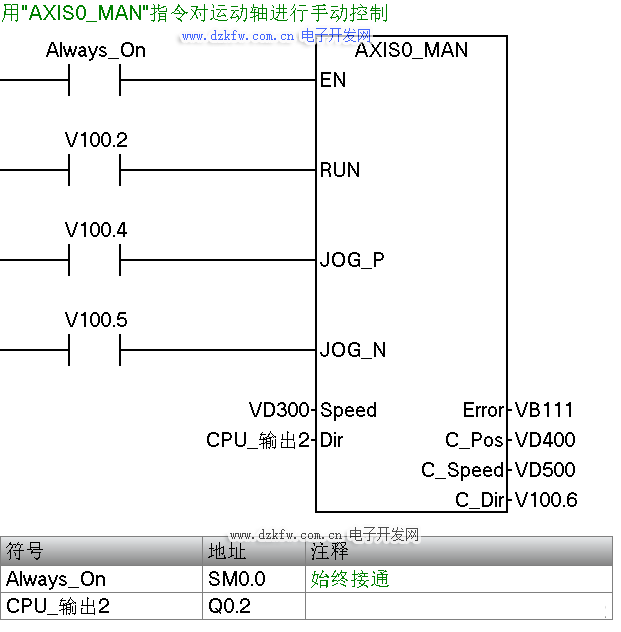
łD7 ▀\(y©┤n)äė(d©░ng)▌S╩ųäė(d©░ng)┐žųŲ
5Īóė├│§╩╝╗»ųĖ┴Ņ"AXIS0_CTRL"Ą─DONE╬╗üĒ(l©ói)ė|░l(f©Ī)ą▐Ė─╬╗ų├ųĖ┴Ņ"AXIS0_LDPOS"Ż¼īó▒Ż│ų╬╗ų├VD1000čb▌dĄĮ«ö(d©Īng)Ū░╬╗ų├VD200Ż¼╚ńłD8╦∙╩ŠŻ╗
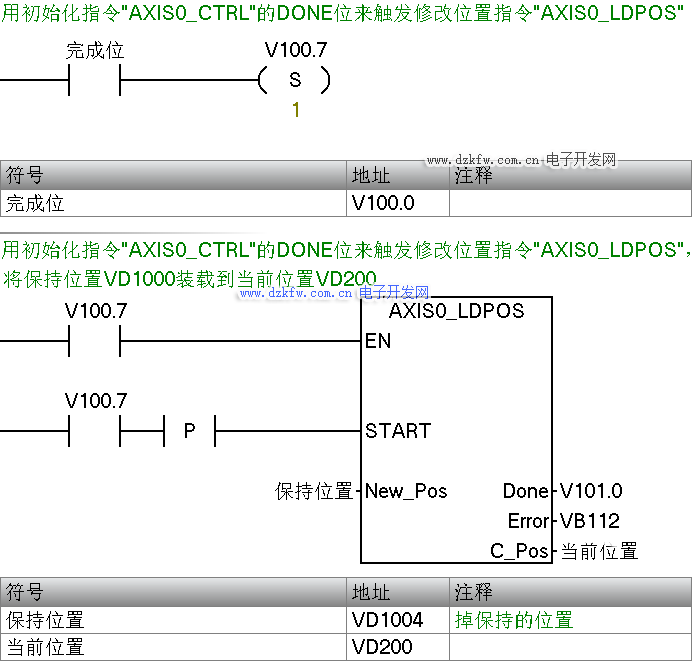
łD8 Ī░AXIS0_LDPOSĪ▒│§╩╝╗»
6Īóīó│╠ą“ŠÄūg▓óŽ┬▌dĄĮCPUųą▀\(y©┤n)ąąŻ╗
7Īóį┌ĀŅæB(t©żi)łDś╦(bi©Īo)ųą▌ö╚ļĄžųĘVD200ĪóVD300ĪóVD1000ĪóVD1004ĪóV100.0ĪóV100.2ĪóV100.7Ż¼ķ_╩╝│ų└m(x©┤)▒O(ji©Īn)ęĢĀŅæB(t©żi)łD▒ĒųąĄ─ūā┴┐Ż¼╚ńłD9╦∙╩ŠŻ╗
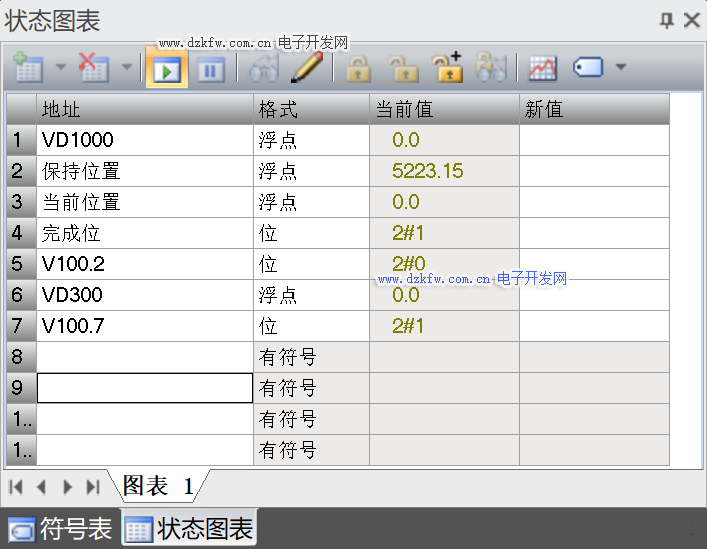
łD9 ĀŅæB(t©żi)łD▒Ē
8Īóą▐Ė─▀\(y©┤n)äė(d©░ng)▌S╩ųäė(d©░ng)┐žųŲ╦┘Č╚Ż¼īóV100.2ų├╬╗Ż¼╩╣▓Į▀M(j©¼n)ļŖÖC(j©®)ą²▐D(zhu©Żn)ę╗Č©Ą─ĮŪČ╚Ż¼ė^▓ņVD200║═VD1000ā╔éĆ(g©©)ĄžųĘ«ö(d©Īng)Ū░ųĄĄ─ūā╗»Ż¼╚ńłD10╦∙╩ŠŻ╗
łD10 ╩╣▓Į▀M(j©¼n)ļŖÖC(j©®)ķ_╩╝▀\(y©┤n)äė(d©░ng)
9Īó═Żų╣▒O(ji©Īn)ęĢĀŅæB(t©żi)łD▒ĒųąĄ─ūā┴┐Ż¼PLCöÓļŖ║¾ųžą┬▀\(y©┤n)ąąŻ¼į┘ķ_╩╝│ų└m(x©┤)▒O(ji©Īn)ęĢĀŅæB(t©żi)łD▒ĒųąĄ─ūā┴┐Ż¼ī”(du©¼)▒╚VD1004ĄžųĘĄ─«ö(d©Īng)Ū░ųĄ║═▓Į¾E8ųąVD200┼cVD1000ĄžųĘī”(du©¼)æ¬(y©®ng)ųĄĄ─ĻP(gu©Īn)ŽĄŻ¼╚ńłD11╦∙╩ŠŻ╗
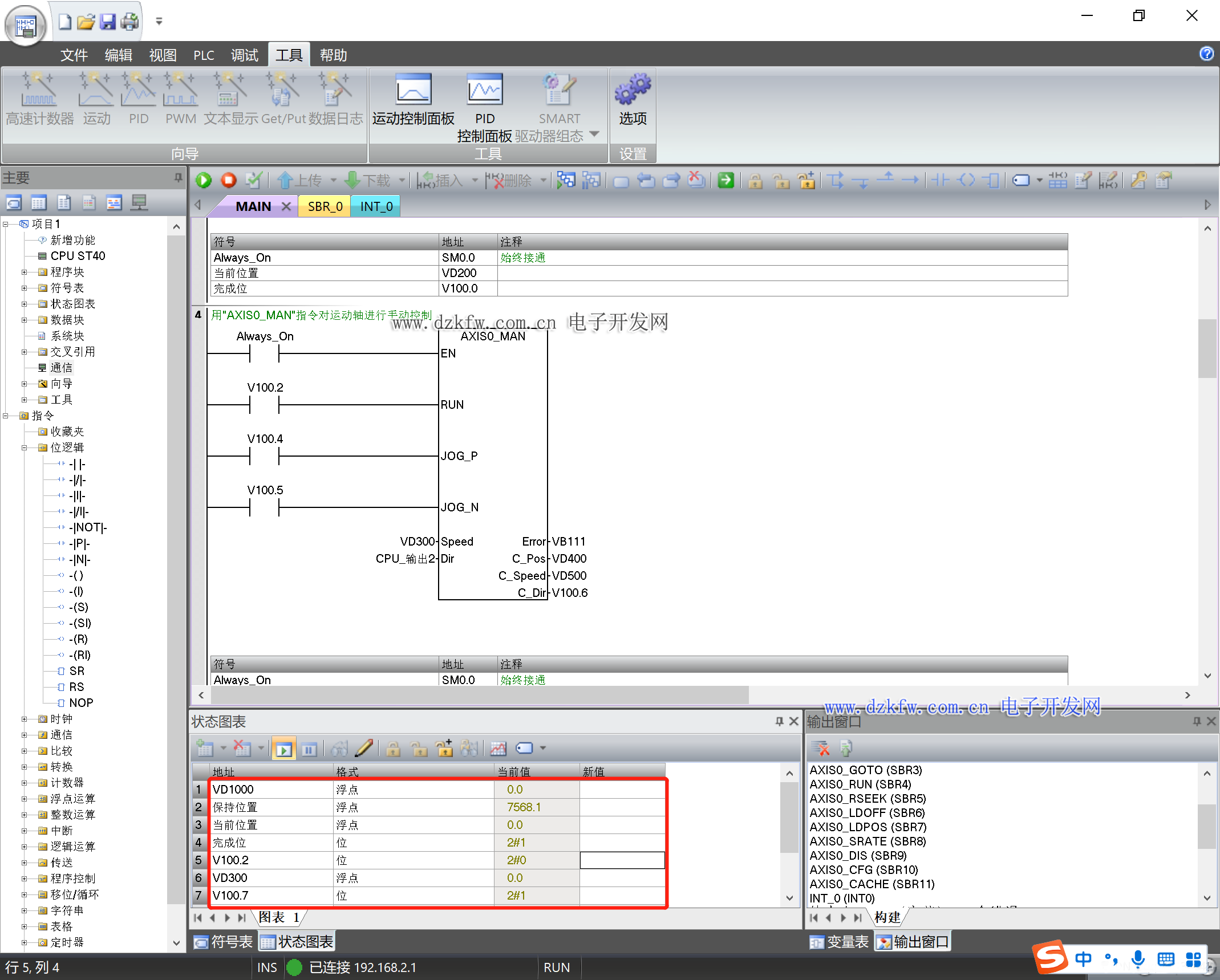
łD11 öÓļŖųžą┬▀\(y©┤n)ąą║¾ūā┴┐ĀŅæB(t©żi)
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō(y©©)├µ
╦óą┬Ēō(y©©)├µ Ž┬ĄĮĒō(y©©)Ąū
Ž┬ĄĮĒō(y©©)Ąū