
╬„ķTūėPLCsmart200-PID ūįäė/╩ųäėš{(di©żo)╣Ø(ji©”)Ą─¤oö_äėŪąōQ
PID ūįäė/╩ųäėš{(di©żo)╣Ø(ji©”)Ą─¤oö_äėŪąōQ
ėąą®╣ż│╠ĒŚ─┐ųą┐╔─▄ąĶę¬Ė∙ō■(j©┤)╣ż╦ćę¬Ū¾į┌▓╗═¼Ą─Ģr┐╠═Č╚ļĪó╗“š▀═╦│÷ PID ūįäė┐žųŲŻ╗═╦│÷ PID ūįäė┐žųŲĢrŻ¼┐žųŲŲ„Ą─▌ö│÷▓┐Ęų┐╔ęįė╔▓┘ū„╚╦åTų▒Įė╩ųäė┐žųŲĪŻ▀@Š═╩Ū╦∙ų^Ą─ PID ╩ųäė/ūįäėŪąōQĪŻ
PID ┐žųŲ╠Äė┌ūįäėĘĮ╩ĮĢrŻ¼PID ┐žųŲŲ„Ż©S7-200 SMART ųąĄ─ PID š{(di©żo)╣Ø(ji©”)╣”─▄Ż®Ģ■░┤šš PID ╦ŃĘ©Ż¼ūįäė═©▀^▌ö│÷Ą─ū„ė├╩╣▀^│╠Ę┤üųĄĖ·ļSĮoČ©ųĄūā╗»Ż¼▓ó▒Ż│ųĘĆ(w©¦n)Č©ĪŻ▀@╩Ūę╗éĆūįäėĄ─ķ]Łh(hu©ón)┐žųŲŽĄĮy(t©»ng)ĪŻ▓┘ū„╚╦åT┐╔ęįĖ∙ō■(j©┤)¼F(xi©żn)ł÷╣ż╦ćĄ─ę¬Ū¾Ż¼Ė─ūāĮoČ©Ż©╝┤įO(sh©©)Č©ųĄŻ®Ą─ųĄĪŻ
PID ┐žųŲ╠Äė┌╩ųäėĘĮ╩ĮĢrŻ¼PID ┐žųŲŲ„▓╗į┘Ųūįäėėŗ╦ŃĄ─ū„ė├ĪŻ▀@ĢrŻ¼┐žųŲ╗ž┬ĘĄ─▌ö│÷╩Ūė╔▓┘ū„╚╦åT╩ųäė┐žųŲĪóš{(di©żo)š¹Ż¼ė╔▓┘ū„╚╦åTė^▓ņ¼F(xi©żn)ł÷Ą─┐žųŲą¦╣¹Ż¼Å─Č°śŗ(g©░u)│╔╚╦╣żķ]Łh(hu©ón)┐žųŲĪŻ
╦∙ų^ PID ūįäė/╩ųäė┐žųŲŻ¼Š═╩Ū┐┤┐žųŲŽĄĮy(t©»ng)Ą─▌ö│÷╩Ūė╔ PID ┐žųŲŲ„ūįäė┐žųŲŻ¼▀Ć╩Ūė╔▓┘ū„╚╦åT╩ųäė┐žųŲĪŻ
ėąą®┐žųŲŽĄĮy(t©»ng)Ą─ł╠(zh©¬)ąąÖCśŗ(g©░u)▓╗─▄│ą╩▄▌^┤¾Ą─ø_ō¶Ż¼▀@Š═ę¬Ū¾į┌▀Mąą PID ūįäė/╩ųäėŪąōQĢrŻ¼▒Ż│ų┐žųŲ▌ö│÷Ą─ĘĆ(w©¦n)Č©ĪŻ▀@Š═╩Ūę¬Ū¾¤oö_äėŪąōQĪŻ
×ķ┴╦▀_ĄĮ PID ūįäė/╩ųäė┐žųŲĄ─¤oö_äėŪąōQŻ¼ąĶę¬į┌ŠÄ│╠ĢrūóęŌę╗ą®ŽÓĻP(gu©Īn)╩┬ĒŚĪŻŽ┬├µĘųäeŠ═ų▒Įė╩╣ė├ PID ųĖ┴ŅŠÄ│╠Ż¼║═╩╣ė├ PID Ž“?q©▒)¦ŠÄ│╠ā╔ĘNŪķørū„ę╗ĮķĮBĪŻ
1.ų▒Įė╩╣ė├ PID ųĖ┴ŅŠÄ│╠ĢrĄ─ PID ūįäė/╩ųäė¤oö_ŪąōQ
ų▒Įė╩╣ė├ PID ųĖ┴ŅēKŠÄīæ PID ┐žųŲ│╠ą“ĢrŻ¼┐╔ęį║åå╬Ąž╩╣ė├Ī░š{(di©żo)ė├/▓╗š{(di©żo)ė├Ī▒ųĖ┴ŅĄ─ĘĮ╩Į┐žųŲūįäė/╩ųäė─Ż╩ĮĪŻę“×ķ PID ųĖ┴Ņ▒Š╔ĒęčĮø(j©®ng)Š▀ėąīŹ¼F(xi©żn)¤oö_äėŪąōQĄ──▄┴”Ż¼┤╦Ģrį┌ PID ųĖ┴Ņ┐žųŲŁh(hu©ón)╣Ø(ji©”)ų«═ŌŠÄ│╠ø]ėąČÓ┤¾▒žę¬ĪŻ
PID ųĖ┴ŅĄ─ EN ▌ö╚ļČ╦╩╣─▄Ż©×ķĪ░1Ī▒Ż®ĢrŻ¼╬ęéāšJ×ķ╩Ūūįäė┐žųŲ─Ż╩ĮŻ╗EN ▌ö╚ļČ╦╬┤╩╣─▄Ż©×ķĪ░0Ī▒Ż®ĢrŻ¼╬ęéāšJ×ķ╩Ū╩ųäė┐žųŲ─Ż╩ĮĪŻ
PID ųĖ┴Ņ▒Š╔Ēėąę╗éĆĪ░─▄┴„Üv╩ĘĀŅæB(t©żi)╬╗Ī▒Ż¼ęįėøõøųĖ┴ŅĄ─ĀŅæB(t©żi)ŪąōQĪŻį┌ EN Č╦Å─Ī░0Ī▒ūā?y©Łu)ķĪ▒Ī?Ī▒ĢrŻ¼PID ųĖ┴ŅšJ×ķ▀@╩ŪÅ─Ī░╩ųäėĪ▒─Ż╩ĮŽ“Ī░ūįäėĪ▒─Ż╩ĮŪąōQĪŻPID ųĖ┴Ņ┤╦ĢrĢ■ūįäėł╠(zh©¬)ąąę╗ŽĄ┴ąäėū„Ż¼ęį┼õ║Ž¤oö_äėŪąōQŻ║
- ╩╣įO(sh©©)Č©ųĄŻ© SPnŻ® = «öŪ░▀^│╠Ę┤üūā┴┐Ż©PVnŻ®
- įO(sh©©)ų├╔Ž┤╬▓╔śė▀^│╠ūā┴┐Ż©PVn-1Ż® = «öŪ░▀^│╠Ę┤üūā┴┐Ż©PVnŻ®
- įO(sh©©)ų├ĘeĘųŲ½▓Ņ║═Ż©╗“╦∙ų^ĘeĘųŪ░ĒŚŻ®Ż©MxŻ® = «öŪ░▌ö│÷ųĄŻ©MnŻ®
╩╣įO(sh©©)Č©ųĄĄ╚ė┌«öŪ░Ę┤üųĄ┐╔ęį▒▄├Ō│÷¼F(xi©żn)Ų½▓ŅŻ¼╩╣ų«▓╗┤µį┌š{(di©żo)š¹Ą─ę¬Ū¾Ż╗«ö╚╗╚ń╣¹ėą╣ż╦ćę¬Ū¾Ż¼ę▓┐╔ęį║¾└m(x©┤)š{(di©żo)š¹įO(sh©©)Č©ųĄĪŻŲõ╦¹Ą─äėū„Č╝╩Ū×ķ┴╦╩╣ PID į┌║¾└m(x©┤)Ą─▓┘ū„ųą▓╗Ė─ūā▌ö│÷Ą─ųĄĪŻ
į┌ŠÄ│╠Ģrę¬ūóęŌŻ║
- Å─ūįäė─Ż╩ĮŽ“╩ųäė─Ż╩ĮŪąōQĢrŻ¼PID ųĖ┴ŅĄ─ EN Č╦▓╗į┘ėą─▄┴„Ż¼ėŗ╦Ń═Żų╣Ż¼▌ö│÷ųĄ Mn ▓╗į┘ūā╗»ĪŻ┤╦Ģr╚ń╣¹ąĶę¬▓┘ū„╚╦åT╚╦╣żė^▓ņ┐žųŲĄ─ĮY(ji©”)╣¹Ż¼╩ųäė┐žųŲ▌ö│÷┴┐Ż¼Š═┐╔ęį═©▀^ė├æ¶│╠ą“ų▒ĮėĖ─ūā╗ž┬Ę▒ĒųąĄ─▌ö│÷ųĄ┤µā”å╬į¬ā╚(n©©i)╚▌Ż©ęŖöĄ(sh©┤)ō■(j©┤)ēK╗“ŽĄĮy(t©»ng)╩ųāįĄ─ŽÓĻP(gu©Īn)▓┐Ęųā╚(n©©i)╚▌Ż®ĪŻ╚ń╣¹ėą▒žę¬Ż¼▓┘ū„╚╦åTĄ─▓┘ū„┐╔─▄ę¬▀Mąąę╗ą®ś╦£╩╗»ōQ╦ŃĪŻ
- ×ķ▒ŻūCÅ─╩ųäė─Ż╩ĮŽ“ūįäė─Ż╩ĮĄ─ŪąōQ¤oö_äėŻ¼ąĶę¬į┌╩ųäė┐žųŲĢrŻ¼╗“į┌ŪąōQ▀^│╠ųąŻ¼Į¹ų╣ī” PID ╗ž┬Ę▒ĒųąįO(sh©©)Č©ųĄĄ─Ė³ą┬Ż¼ęį▒ŃŪąōQĢr PID ųĖ┴Ņė├«öŪ░▀^│╠Ę┤üųĄ╠µ┤·įO(sh©©)Č©ųĄĪŻŪąōQ═Ļ│╔║¾Ż¼▓┘ū„╚╦åT┐╔ęįš{(di©żo)š¹įO(sh©©)Č©ųĄĪŻ
2.╩╣ė├ PID Ž“?q©▒)¦ŠÄ│╠ĢrĄ─ PID ūįäė/╩ųäė¤oö_ŪąōQ
╩╣ė├ PID ųĖ┴ŅŽ“?q©▒)¦ŠÄ│╠ĢrŻ¼ųĖ┴ŅŽ“?q©▒)¦Ģ■ūįäėš{(di©żo)ė├ PID ųĖ┴ŅŻ¼▓óŪęŠÄīæ═Ōć·Ą─┐žųŲūā┴┐ś╦£╩╗»ōQ╦ŃĪóČ©Ģr▓╔śėĄ╚╣”─▄ĪŻė├æ¶į┌╩╣ė├ PID ųĖ┴ŅŽ“?q©▒)¦ĢrŻ¼ąĶę¬į┌ė├æ¶│╠ą“ųąė├ SM0.0 š{(di©żo)ė├ųĖ┴ŅŽ“?q©▒)¦╔·│╔Ą─ūė│╠ą“Ż©╚?PIDx_CTRL ūė│╠ą“Ż®ĪŻPID Ž“?q©▒)¦┐╔ęį╔·│╔Ħūįä?╩ųäėŪąōQ╣”─▄Ą─ūė│╠ą“Ż¼▀@éĆūė│╠ą“╩╣ė├ę╗éĆöĄ(sh©┤)ūų┴┐³c×ķĪ░1Ī▒ĪóĪ░0Ī▒Ą─ĀŅæB(t©żi)üĒ┐žųŲ╩Ūʱ═Č╚ļ PID ūįäė┐žųŲĪŻ
ĄĮ─┐Ū░×ķų╣Ż©STEP 7-Micro/WIN SMARTŻ®Ż¼╩╣ė├ PID Ž“?q©▒)¦╔·│╔Ą─ūė│╠ą“ĢrŻ¼ė╔ė┌ė├æ¶│╠ą“▓╗─▄ų▒Įė╩╣ė├ PID ųĖ┴ŅŻ¼╦³Ą─¤oö_ŪąōQ─▄┴”ę“×ķĖ¶┴╦═ŌÜżūė│╠ą“Ż¼╦∙ęį╩▄ĄĮ┴╦ŠųŽ▐ĪŻ╚ń╣¹ī”¤oö_ŪąōQę¬Ū¾▒╚▌^ć└Ė±Ż¼ąĶę¬┴Ē═ŌŠÄę╗ą®│╠ą“╝ėęį╠Ä└ĒĪŻ
┐╝▓ņ╚ńŽ┬ PID ┐žųŲūė│╠ą“ĪŻ
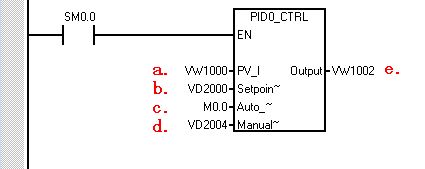
łD 1. PID Ž“?q©▒)¦╔·│╔Ą─ųĖ┴?
łDųąŻ║
- ▀^│╠Ę┤ü┴┐
- įO(sh©©)Č©ųĄŻ¼īŹöĄ(sh©┤)
- ūįäė/╩ųäė┐žųŲŻ¼Ī░1Ī▒=ūįäėŻ¼Ī░0Ī▒=╩ųäė
- ╩ųäė┐žųŲ▌ö│÷ųĄŻ¼0.0 - 1.0 ų«ķgĄ─ę╗éĆīŹöĄ(sh©┤)
- PID ┐žųŲ▌ö│÷ųĄ
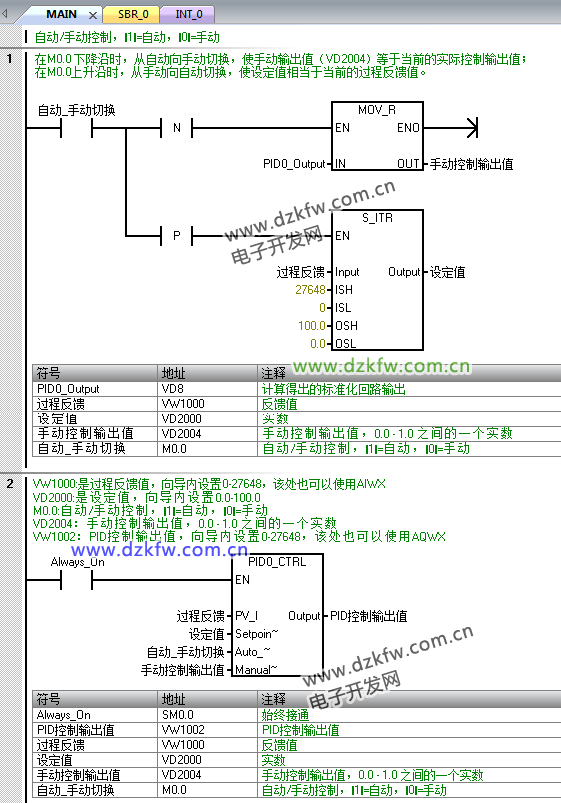
ę¬īŹ¼F(xi©żn)¤oö_äėŪąōQŻ¼▒žĒÜŻ║
- į┌Å─ūįäėŽ“╩ųäėŪąōQĢrŻ¼╩╣╩ųäė▌ö│÷ųĄŻ©VD2004Ż®Ą╚ė┌«öŪ░Ą─īŹļH┐žųŲ▌ö│÷ųĄŻ╗
- į┌Å─╩ųäėŽ“ūįäėŪąōQĢrŻ¼╩╣įO(sh©©)Č©ųĄŽÓ«öė┌«öŪ░Ą─▀^│╠Ę┤üųĄĪŻ
×ķ┤╦Ż¼┐╔ŠÄīæŅÉ╦ŲŽ┬łD╦∙╩ŠĄ─│╠ą“Ż¼Ę┼į┌ PID ┐žųŲūė│╠ą“ų«Ū░Ż║
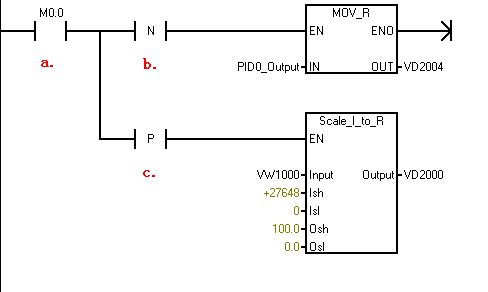
łD 2. ¤oö_ŪąōQ╠Ä└Ē│╠ą“
łDųąŻ║
- ūįäė/╩ųäėŪąōQ┐žųŲ³c
- Å─ūįäėŽ“╩ųäėŪąōQĢrŻ¼╩╣╩ųäė▌ö│÷ųĄĄ╚ė┌īŹļH«öŪ░ųĄ
- Å─╩ųäėŽ“ūįäėŪąōQĢrŻ¼░č«öŪ░Ę┤ü┴┐ōQ╦Ń×ķŽÓæ¬(y©®ng)Ą─ĮoČ©ųĄ
![]() ╔Ž╩÷│╠ą“ųąĄ─ Scale_I_to_R Š═╩Ū┴┐│╠ūāōQųĖ┴ŅÄņųąĄ─ūė│╠ą“Ż¼╚ń║╬īóįōųĖ┴ŅÄņī¦(d©Żo)╚ļĄĮMicro/WIN SMART ųą┐╔ģóęŖ╚ń║╬īóMicro/WIN Ą─Äņ╬─╝■ī¦(d©Żo)╚ļĄĮMicro/WIN SMARTųąĪŻ▀@╩Ū×ķ┴╦ĮŌøQ▀^│╠Ę┤ü┼cįO(sh©©)Č©ųĄų«ķgĄ─ōQ╦Ńå¢Ņ}ĪŻė├æ¶ę▓┐╔ęįūį╝║ŠÄ│╠ōQ╦ŃŻ¼╗“š▀Ė∙ō■(j©┤)Ę┤ü┼cĮoČ©Ą─╚ĪųĄĘČć·øQČ©╩ŪʱąĶę¬ōQ╦ŃĪŻ
╔Ž╩÷│╠ą“ųąĄ─ Scale_I_to_R Š═╩Ū┴┐│╠ūāōQųĖ┴ŅÄņųąĄ─ūė│╠ą“Ż¼╚ń║╬īóįōųĖ┴ŅÄņī¦(d©Żo)╚ļĄĮMicro/WIN SMART ųą┐╔ģóęŖ╚ń║╬īóMicro/WIN Ą─Äņ╬─╝■ī¦(d©Żo)╚ļĄĮMicro/WIN SMARTųąĪŻ▀@╩Ū×ķ┴╦ĮŌøQ▀^│╠Ę┤ü┼cįO(sh©©)Č©ųĄų«ķgĄ─ōQ╦Ńå¢Ņ}ĪŻė├æ¶ę▓┐╔ęįūį╝║ŠÄ│╠ōQ╦ŃŻ¼╗“š▀Ė∙ō■(j©┤)Ę┤ü┼cĮoČ©Ą─╚ĪųĄĘČć·øQČ©╩ŪʱąĶę¬ōQ╦ŃĪŻ
×ķ┴╦Ė³║├Ąž└ĒĮŌ PIDŽ“?q©▒)¦Ą─ūįä?╩ųäė¤oö_ŪąōQĄ─╩╣ė├Ż¼┐╔ģó┐╝Ž┬├µĄ─└²│╠ĪŻ
╩╣ė├Łh(hu©ón)Š│Ż║ STEP 7 Micro/WIN SMART V2.3.2
īŹ¼F(xi©żn)╣”─▄Ż║ PIDŽ“?q©▒)¦Ą─ūįä?╩ųäė¤oö_ŪąōQ
![]() PIDŽ“?q©▒)¦ūįä?╩ųäė¤oö_ŪąōQ Ż©╣ż│╠╬─╝■Ž┬▌dµ£ĮėŻ®Ż║
PIDŽ“?q©▒)¦ūįä?╩ųäė¤oö_ŪąōQ Ż©╣ż│╠╬─╝■Ž┬▌dµ£ĮėŻ®Ż║
│╠ą“ĮžłD╚½▓┐╚ńŽ┬Ż║
├Ōž¤┬Ģ├„
▒Š└²│╠āH╣®ģó┐╝Ż¼│╠ą“ųąĄ─CPU░µ▒ŠĪóŅÉą═┐╔─▄┼cė├æ¶īŹļH╩╣ė├▓╗═¼Ż¼ė├æ¶┐╔─▄ąĶꬎ╚ī”└²ūė│╠ą“ū÷ą▐Ė─║═š{(di©żo)š¹Ż¼▓┼─▄īóŲõė├ė┌£yįćĪŻ▒Š└²│╠Ą─ū„š▀║═ōĒėąš▀ī”ė┌įō└²│╠Ą─╣”─▄ąį║═╝µ╚▌ąį▓╗žō╚╬║╬ž¤╚╬Ż¼╩╣ė├įō└²│╠Ą─’LļU═Ļ╚½ė╔ė├æ¶ūįąą│ąō·ĪŻė╔ė┌╦³╩Ū├Ō┘MĄ─Ż¼╦∙ęį▓╗╠ß╣®╚╬║╬ō·▒ŻŻ¼Õeš`╝mš²║═¤ßŠĆų¦│ųŻ¼ė├æ¶▓╗▒ž×ķ┤╦┬ō(li©ón)ŽĄ╬„ķTūė╝╝ąg(sh©┤)ų¦│ų┼cĘ■äš(w©┤)▓┐ķTĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū