
╩▓├┤╩Ū▓Į▀MļŖÖCŻ┐
▓Į▀MļŖÖC╩ŪīóļŖ├}ø_ą┼╠¢Ż¼▐Dūā×ķĮŪ╬╗ęŲ╗“ŠĆ╬╗ęŲĄ─ķ_Łh┐žųŲļŖÖCŻ¼ėųĘQ×ķ├}ø_ļŖÖCĪŻį┌ĘŪ│¼▌dĄ─ŪķørŽ┬Ż¼ļŖÖCĄ─▐D╦┘Īó═Żų╣Ą─╬╗ų├ų╗╚ĪøQė┌├}ø_ą┼╠¢Ą─Ņl┬╩║═├}ø_öĄŻ¼Č°▓╗╩▄žō▌dūā╗»Ą─ė░ĒæĪŻ«ö▓Į▀M“īäėŲ„Įė╩šĄĮę╗éĆ├}ø_ą┼╠¢ĢrŻ¼╦³Š═┐╔ęį“īäė▓Į▀MļŖÖC░┤įOČ©Ą─ĘĮŽ“▐Däėę╗éĆ╣╠Č©Ą─ĮŪČ╚Ż¼ĘQ×ķĪ░▓ĮŠÓĮŪĪ▒ĪŻ
▓Į▀MļŖÖCĄ─ą²▐D╩Ūęį╣╠Č©Ą─ĮŪČ╚ę╗▓Įę╗▓Į▀\ąąĄ─Ż¼┐╔ęį═©▀^┐žųŲ├}ø_éĆöĄüĒ┐žųŲĮŪ╬╗ęŲ┴┐Ż¼Å─Č°▀_ĄĮ£╩┤_Č©╬╗Ą──┐Ą─Ż¼═¼Ģr┐╔ęį═©▀^┐žųŲ├}ø_Ņl┬╩Ż¼üĒ┐žųŲļŖÖC▐DäėĄ─╦┘Č╚║═╝ė╦┘Č╚Ż¼Å─Č°▀_ĄĮš{╦┘Ą──┐Ą─ĪŻ▓Į▀MļŖÖCČÓė├ė┌öĄūų╩Įėŗ╦ŃÖCĄ─═Ō▓┐įOéõŻ¼ęį╝░┤“ėĪÖCĪó└LłDÖC║═┤┼▒PĄ╚čbĪŻ
02
▓Į▀MļŖÖCĄ─╠ž³c
▓Į▀MļŖÖC╣żū„ĢrĄ─╬╗ų├║═╦┘Č╚ą┼╠¢▓╗Ę┤üĮo┐žųŲŽĄĮyŻ¼╚ń╣¹ļŖÖC╣żū„ĢrĄ─╬╗ų├║═╦┘Č╚ą┼╠¢Ę┤üĮo┐žųŲŽĄĮyŻ¼─Ū├┤╦³Š═ī┘ė┌╦┼Ę■ļŖÖCĪŻŽÓī”ė┌╦┼Ę■ļŖÖCŻ¼▓Į▀MļŖÖCĄ─┐žųŲŽÓī”║åå╬Ż¼Ą½▓╗▀mė├ė┌Š½Č╚ę¬Ū¾▌^Ė▀Ą─ł÷║ŽĪŻ
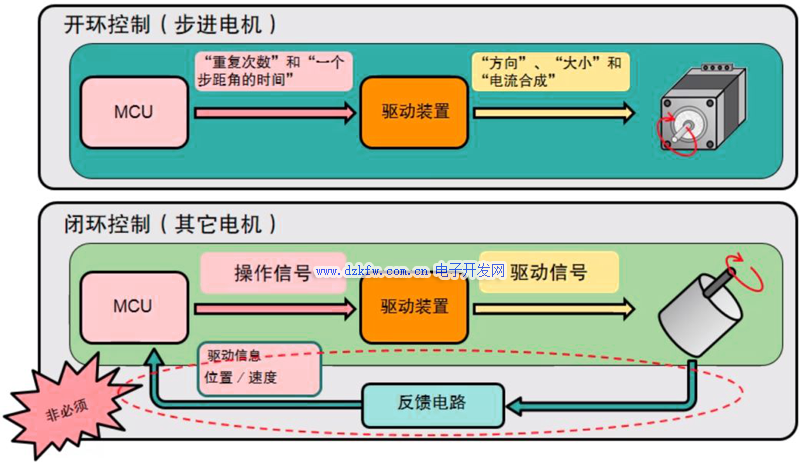
▓Į▀MļŖÖCĄ─ā׳c║═╚▒³cČ╝ĘŪ│ŻĄ─═╗│÷Ż¼ā׳c╝»ųąė┌┐žųŲ║åå╬ĪóŠ½Č╚Ė▀Ż¼╚▒³c╩Ūįļ┬ĢĪóšäė║═ą¦┬╩Ż¼╦³ø]ėą└█Ęeš`▓ŅŻ¼ĮYśŗ║åå╬Ż¼╩╣ė├ŠSą▐ĘĮ▒ŃŻ¼ųŲįņ│╔▒ŠĄ═ĪŻ▓Į▀MļŖÖCĦäėžō▌dæT┴┐Ą──▄┴”┤¾Ż¼▀mė├ė┌ųąąĪą═ÖC┤▓║═╦┘Č╚Š½Č╚ę¬Ū¾▓╗Ė▀Ą─ĄžĘĮŻ¼╚▒³c╩Ūą¦┬╩▌^Ą═Īó░l¤ß┤¾Ż¼ėąĢrĢ■Ī░╩¦▓ĮĪ▒ĪŻā×╚▒³c╚ńŽ┬╦∙╩ŠĪŻ
ā׳cŻ║
1. ļŖÖC▓┘ū„ęūė┌═©▀^├}ø_ą┼╠¢▌ö╚ļĄĮļŖÖC▀Mąą┐žųŲŻ╗
2. ▓╗ąĶę¬Ę┤üļŖ┬ĘęįĘĄ╗žą²▐D▌SĄ─╬╗ų├║═╦┘Č╚ą┼ŽóŻ©ķ_Łh┐žųŲŻ®Ż╗
3. ė╔ė┌ø]ėąĮėė|ļŖ╦óČ°īŹ¼F┴╦Ė³┤¾Ą─┐╔┐┐ąįĪŻ
╚▒³cŻ║
1. ąĶę¬├}ø_ą┼╠¢▌ö│÷ļŖ┬ĘŻ╗
2. «ö┐žųŲ▓╗▀m«öĄ─Ģr║“Ż¼┐╔─▄Ģ■│÷¼F═¼▓ĮüG╩¦Ż╗
3. ė╔ė┌į┌ą²▐D▌S═Żų╣║¾╚į╚╗┤µį┌ļŖ┴„Č°«a╔·¤ß┴┐ĪŻ
03
▓Į▀MļŖÖCĄ─ĘųŅÉ
į┌ŽÓ═¼ļŖ┴„ŪęŽÓ═¼▐DŠž▌ö│÷Ą─Śl╝■Ž┬Ż¼å╬śOą═▓Į▀MļŖÖC▒╚ļpśOą═▓Į▀MļŖÖCČÓę╗▒ČĄ─ŠĆ╚”Ż¼│╔▒ŠĖ³Ė▀Ż¼┐žųŲļŖ┬ĘĄ─ĮYśŗę▓▓╗ę╗śėŻ¼─┐Ū░╩ął÷╔Ž┴„ąąĄ─┤¾ČÓ╩ŪļpśOą═▓Į▀MļŖÖCĪŻ
▓Į▀MļŖÖCį┌śŗįņ╔Ž═©│Żų„ę¬░┤šš▐Dūė╠ž³c║═Č©ūė└@ĮM▀MąąĘųŅÉŻ¼Ž┬├µīóįö╝ÜĮķĮB▀@ā╔ĘNŅÉą═Ą─ĘųŅÉĪŻ

░┤šš▐DūėĘųŅÉŻ¼ėą╚²ĘNų„ę¬ŅÉą═Ż║Ę┤æ¬╩ĮŻ©VRą═Ż®Īóė└┤┼╩ĮŻ©PMą═Ż®Īó╗ņ║Ž╩ĮŻ©HBą═Ż®ĪŻ
Ę┤æ¬╩Į
Č©ūė╔Žėą└@ĮMŻ¼└@ĮMė╔▄ø┤┼▓─┴ŽĮM│╔ĪŻŲõĮYśŗ║åå╬Īó│╔▒ŠĄ═Īó▓ĮŠÓĮŪąĪŻ¼┐╔▀_1.2Č╚Ż¼Ą½äėæBąį─▄▓ŅŻ¼ą¦┬╩Ą═Īó░l¤ß┤¾Ż¼┐╔┐┐ąįļyęį▒ŻūCĪŻ
ė└┤┼╩Į
ė└┤┼╩Į▓Į▀MļŖÖCĄ─▐Dūėė├ė└┤┼▓─┴ŽųŲ│╔Ż¼▐DūėĄ─śOöĄ┼cČ©ūėĄ─śOöĄŽÓ═¼ĪŻŲõ╠ž³c╩ŪäėæBąį─▄║├Īó▌ö│÷┴”Šž┤¾Ż¼Ą½▀@ĘNļŖÖCČ╚▓ŅŻ¼▓ĮŠÓĮŪ┤¾Ż©ę╗░Ń×ķ7.5Č╚╗“15Č╚Ż®ĪŻ
╗ņ║Ž╩Į
╗ņ║Ž╩Į▓Į▀MļŖÖCŠC║Ž┴╦Ę┤æ¬╩Į║═ė└┤┼╩ĮĄ─ā׳cŻ¼ŲõČ©ūė╔Žėą║▄ČÓŽÓ└@ĮMŻ¼▐Dūė╔Ž▓╔ė├ė└┤┼▓─┴ŽŻ¼▐Dūė║═Č©ūėŠ∙ėąČÓéĆąĪ²Xęį╠ßĖ▀▓ĮŠÓŠ½Č╚ĪŻŲõ╠ž³c╩Ū▌ö│÷┴”Šž┤¾ĪóäėæBąį─▄║├Īó▓ĮŠÓĮŪąĪŻ¼Ą½ĮYśŗÅ═ļsĪó│╔▒ŠŽÓī”▌^Ė▀ĪŻ
▓Į▀MļŖÖC░┤ššČ©ūė╔Ž└@ĮMüĒĘųŅÉŻ¼╣▓ėąČ■ŽÓĪó╚²ŽÓ║═╬ÕŽÓĄ╚ŽĄ┴ąĪŻ─┐Ū░ūŅ╩▄ÜgėŁĄ─╩Ūā╔ŽÓ╗ņ║Ž╩Į▓Į▀MļŖÖCŻ¼╝sš╝97%ęį╔ŽĄ─╩ął÷Ę▌Ņ~Ż¼ŲõįŁę“╩Ūąįār▒╚Ė▀Ż¼┼õ╔Ž╝ÜĘų“īäėŲ„║¾ą¦╣¹┴╝║├ĪŻ
įōĘNļŖÖCĄ─╗∙▒Š▓ĮŠÓĮŪ×ķ1.8Č╚/▓ĮŻ¼┼õ╔Ž░ļ▓Į“īäėŲ„║¾Ż¼▓ĮŠÓĮŪ£p╔┘×ķ0.9Č╚Ż¼┼õ╔Ž╝ÜĘų“īäėŲ„║¾ĪŻŲõ▓ĮŠÓĮŪ┐╔╝ÜĘų▀_256▒ČŻ©0.007Č╚/╬ó▓ĮŻ®ĪŻė╔ė┌─”ķ▀┴”║═ųŲįņŠ½Č╚Ą╚įŁę“Ż¼īŹļH┐žųŲŠ½Č╚┬įĄ═ĪŻ═¼ę╗▓Į▀MļŖÖC┐╔┼õ▓╗═¼╝ÜĘųĄ─“īäėŲ„ęįĖ─ūāŠ½Č╚Ą─ą¦╣¹ĪŻ
04
▓Į▀MļŖÖCĄ─╣żū„įŁ└Ē
▓Į▀MļŖÖC╩Ū═©▀^├}ø_ą┼╠¢üĒ▀Mąą┐žųŲŻ¼├┐▌ö╚ļę╗éĆ├}ø_ą┼╠¢Ż¼▓Į▀MļŖÖCŪ░▀Mę╗▓ĮĪŻ▓Į▀MļŖÖCą²▐DĄ─▓ĮŠÓĮŪŻ¼╩Ūį┌ļŖÖCĮYśŗĄ─╗∙ĄA╔ŽĄ╚▒╚└²┐žųŲ«a╔·Ą─Ż¼╚ń╣¹┐žųŲļŖ┬ĘĄ─╝ÜĘų┐žųŲ▓╗ūāŻ¼─Ū├┤▓Į▀Mą²▐DĄ─▓ĮŠÓĮŪį┌└Ēšō╔Ž╩Ūę╗éĆ╣╠Č©Ą─ĮŪČ╚ĪŻį┌īŹļH╣żū„ųąŻ¼ļŖÖCą²▐DĄ─▓ĮŠÓĮŪĢ■ėą╬óąĪĄ─▓ŅäeŻ¼ų„ę¬╩Ūė╔ė┌ļŖÖCĮYśŗ╔ŽĄ─╣╠Č©ėąš`▓Ņ«a╔·Ą─Ż¼Č°Ūę▀@ĘNš`▓Ņ▓╗Ģ■Ęe└█ĪŻ
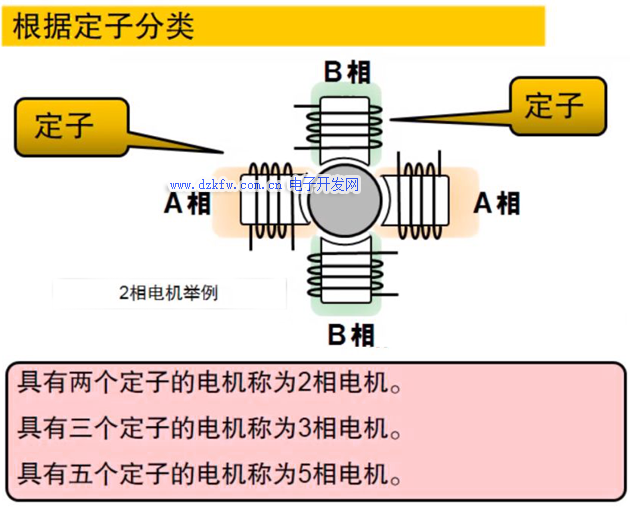
▓Į▀MļŖÖCĄ─┐éśOöĄįĮ┤¾Ż¼╝ė╣żŠ½Č╚Ą─ę¬Ū¾Š═Ģ■įĮĖ▀ĪŻ═©│Ż╣żśIė├╗ņ║Žą═▓Į▀MļŖÖCĄ─▓ĮŠÓĮŪ╩Ū1.8Č╚Ż¼Š═╩Ū200śOĪŻ
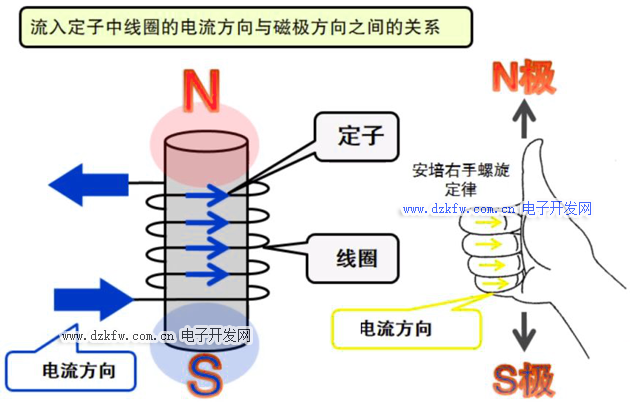
▓Į▀MļŖÖCĄ─ŽÓļŖ┴„╝░┤┼ł÷Ż¼ū±čŁ░▓┼Óėę╩ų┬▌ą²Č©┬╔Ż¼ė╔ļŖ─▄«a╔·┤┼ł÷─▄┴┐Ż¼┐žųŲļŖÖCŽÓļŖ┴„Ż¼Š═─▄╩╣ļŖÖCČ©ūėĄ─┤┼śOĘĮŽ“░l╔·Ę┤▐DŻ¼Č■ŽÓ┤┼ł÷Ą─ūā╗»ŽÓ┼õ║ŽŻ¼▀MČ°«a╔·ļŖÖCĄ─ą²▐DĪŻ
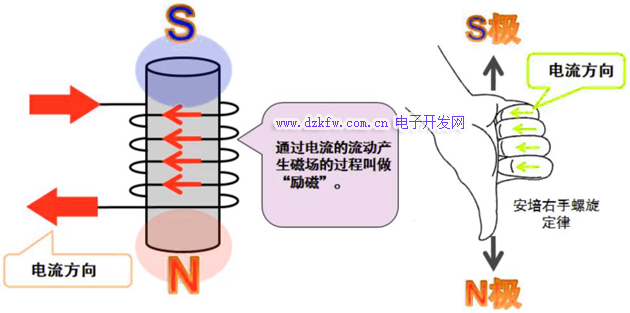
╚ń╣¹ļŖ┴„ĘĮŽ“░l╔·ūā╗»Ż¼┤┼śOĄ─ĘĮŽ“ę▓Ģ■░l╔·ūā╗»Ż¼▓Į▀MļŖÖCĄ─ļŖ┴„┴„▀^Č©ūė«a╔·┤┼ł÷Ą─▀^│╠Įąū÷äŅ┤┼ĪŻ
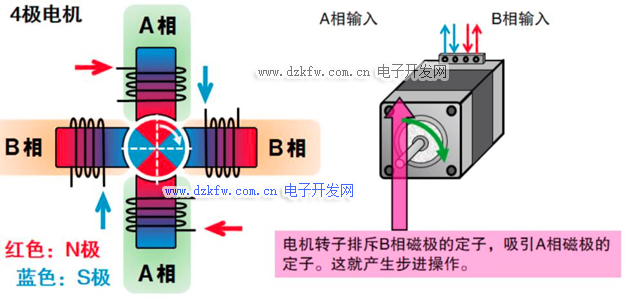
═©│Ż╦∙šfĄ─Č■ŽÓ▓Į▀MļŖÖCŻ¼ļŖÖC▐DūėĄ─ą²▐DŻ¼░³║¼▓╗═¼┤┼śOĄ─┤┼ł÷ŽÓ│Ō║═ŽÓ╬³īŹ¼FĄ─ĪŻ╚ń╔ŽłD╦∙╩ŠŻ¼AŽÓ«a╔·NśO┤┼ł÷╬³ę²▐DūėĄ─SśOŻ¼BŽÓ«a╔·SśO┤┼ł÷╬³ę²▐DūėĄ─NśOŻ¼╩╣Č©ūė«a╔·ą²▐DĄ─äė┴”ĪŻ╚ń╣¹Ė─ūāAĪóBŽÓČ©ūėŠĆ╚”Ą─ļŖ┴„ĘĮŽ“Ż¼ļŖÖCĢ■«a╔·┴Ēę╗▓ĮĄ─ą²▐DĪŻ▀B└mĖ─ūāAĪóBŽÓČ©ūėŠĆ╚”Ą─ļŖ┴„ĘĮŽ“Ż¼ļŖÖCĢ■«a╔·▀B└mĄ─ą²▐DĪŻ
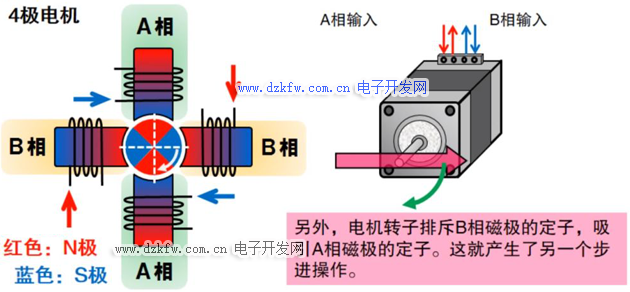
╚ń╔ŽłD╦∙╩ŠŻ¼ļŖÖCĄ─▀\äė╩Ū═©▀^Ė─ūāļŖ┴„į┌ļŖÖCųąĄ─┴„äėüĒīŹ¼FĄ─Ż¼ļŖūė▐Dūė┼┼│ŌBŽÓ┤┼śOĄ─Č©ūėŻ¼╬³ę²AŽÓ┤┼śOĄ─Č©ūėŻ¼▀@Š═«a╔·┴╦┴Ēę╗éĆ▓Į▀M▓┘ū„ĪŻ
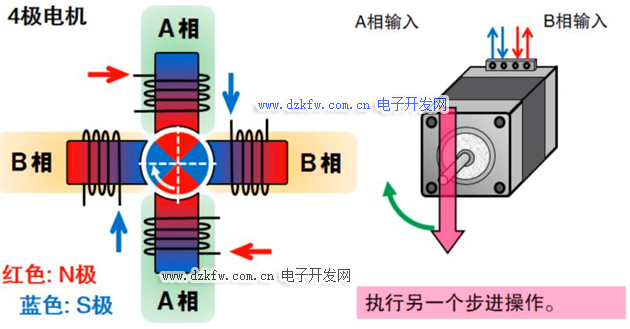
ł╠ąą┴Ēę╗éĆ▓Į▀M▓┘ū„Ż¼ļŖÖCČ©ūė┤┼śOĘ┤▐DŻ¼▐Dūė┼┼│ŌBŽÓ┤┼śOĄ─Č©ūėŻ¼╬³ę²AŽÓ┤┼śOĄ─Č©ūėŻ¼╚ń╔ŽłD╦∙╩ŠĪŻ
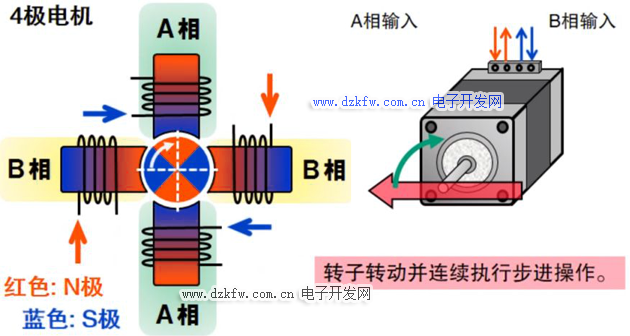
╚ń╔ŽłD╦∙╩ŠŻ¼Č©ūėŠĆ╚”ųąĄ─ļŖ┴„ĘĮŽ“¤ošō║╬Ģr░l╔·ūā╗»Ż¼┤┼śOīóĢ■Ę┤▐DŻ¼▐DūėųžÅ═▓Į▀M▓┘ū„ĪŻ¢|ųź▓Į▀MļŖÖC“īäė┐žųŲļŖ┬Ęī”ļŖÖCĄ─┤┼ł÷äŅ┤┼Ą─┐žųŲŻ¼╩Ū═©▀^├}īÆš{ųŲĘĮ╩ĮīŹ¼FĄ─Ż¼─▄ē“īŹ¼FļŖÖCĖ▀ą¦ĪóĘĆČ©Ą─▀\ąąĪŻ
05
▓Į▀MļŖÖCĄ─▓┘ū„─Ż╩Į
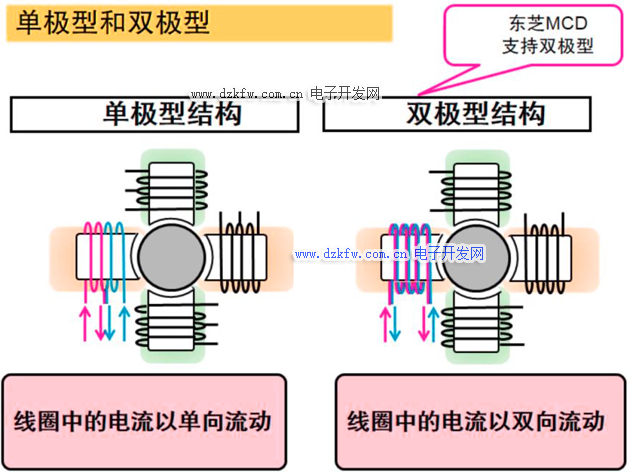
▓Į▀MļŖÖCĄ─╗∙▒Š▓┘ū„─Ż╩ĮĘQ×ķĪ░äŅ┤┼─Ż╩ĮĪ▒Ż¼─▄ē“╩╣▓Į▀MļŖÖC╣żū„į┌╚½▓Į─Ż╩ĮĪó░ļ▓Į─Ż╩Į║═╬ó▓Į─Ż╩ĮŻ¼Ųõųą╬ó▓Į─Ż╩Į─▄ē“ėąą¦Ą─ĮĄĄ═▓Į▀MļŖÖCŽÓļŖ┴„Ą─įļ┬ĢŻ¼─▄ē“Ė─╔Ų▓Į▀MļŖÖC╣╠ėąĄ─įļ┬Ģšäėå¢Ņ}ĪŻŽ┬├µīóĮķĮB3ĘNäŅ┤┼─Ż╩ĮĪŻ
╚½▓Į─Ż╩Į
╦∙ų^╚½▓Į─Ż╩ĮŻ¼Š═╩Ūę└ō■ļŖÖC╣╠ėąĮYśŗįOėŗ╣╠Č©Ą─▓ĮŠÓĮŪ╣żū„Ż¼ę╗éĆļŖ├}ø_Ż¼▓Į▀MļŖÖCŪ░▀Mę╗éĆ▓ĮŠÓĮŪĪŻ▀@éĆ▓ĮŠÓĮŪ╩╣ļŖÖCįOėŗĮYśŗ╦∙øQČ©Ą─Ż¼ę▓┐╔ęį└ĒĮŌ×ķļŖÖCęįūŅ┤¾Ą─▓ĮŠÓĮŪą²▐DĪŻ
░ļ▓Į─Ż╩Į
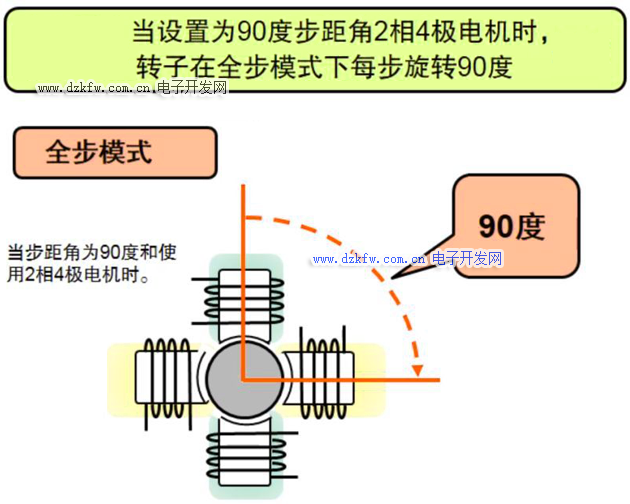
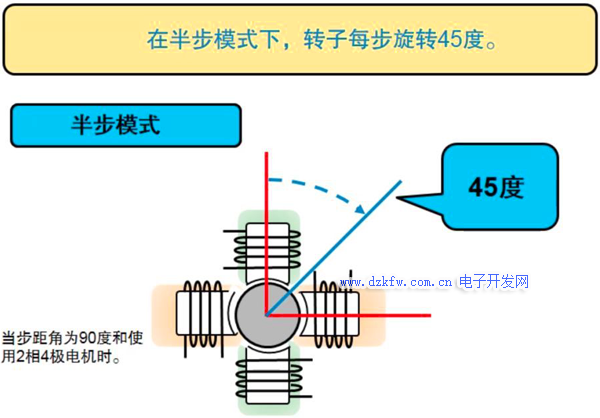
░ļ▓Į─Ż╩Į╩ŪęįļŖÖC╣╠ėąĄ─ĮYśŗøQČ©Ą─▓ĮŠÓĮŪĄ─ę╗░ļĮŪČ╚▀Mąą▓Į▀Mą²▐DĪŻ╚ńŽ┬łD╦∙╩ŠŻ¼▓Į▀MļŖÖCĄ─┐éśOöĄ╩Ū4╝ēŻ¼ī”æ¬Ą─▓ĮŠÓĮŪ╩Ū90Č╚Ż¼─Ū├┤░ļ▓Į─Ż╩ĮŽ┬Ż¼▓Į▀MļŖÖC├┐éĆ├}ø_ą²▐D45Č╚ĪŻ
╬ó▓Į─Ż╩Į
╬ó▓Į─Ż╩ĮŅÉ╦Ųė┌░ļ▓Į─Ż╩ĮŻ¼▓ĮŠÓĮŪĖ³ąĪŻ¼Š═╩Ū1/4▓ĮĪó1/8▓ĮĪó1/16▓ĮŻ¼┐╔ęįĄĮ║▄Ė▀Ą─╝ÜĘųĪŻī”æ¬Ą─▓Į▀MĮŪČ╚Š═╩Ūį┌š¹▓Į▓ĮŠÓĮŪ│╦ęį╬ó▓ĮŽĄöĄĪŻ
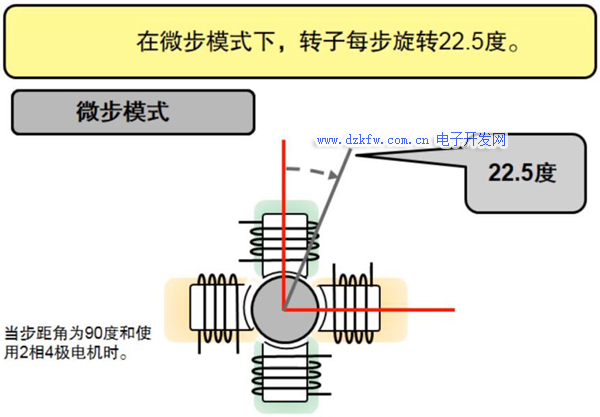
▓Į▀MļŖÖCĄ─▓ĮŠÓĮŪįĮąĪŻ¼ąĶꬥ─╝ė╣żŠ½Č╚Ģ■įĮĖ▀Ż¼ī”æ¬Ą─╬ó▓ĮĢrĄ─▓Į▀MĮŪČ╚Ą─š`▓ŅĢ■įĮ┤¾ĪŻ
06
ļŖÖC┐žųŲ“īäėŲ„
▓Į▀MļŖÖC▓╗─▄ų▒ĮėĮėĄĮ╣żŅlĮ╗┴„╗“ų▒┴„ļŖį┤╔Ž╣żū„Ż¼Č°▒žĒÜ╩╣ė├īŻė├Ą─▓Į▀MļŖÖC“īäėŲ„Ż¼╦³ėą├}ø_░l╔·┐žųŲå╬į¬Īó╣”┬╩“īäėå╬į¬Īó▒Żūoå╬į¬Ą╚ĮM│╔ĪŻ╚ńŽ┬łD╦∙╩ŠĪŻ
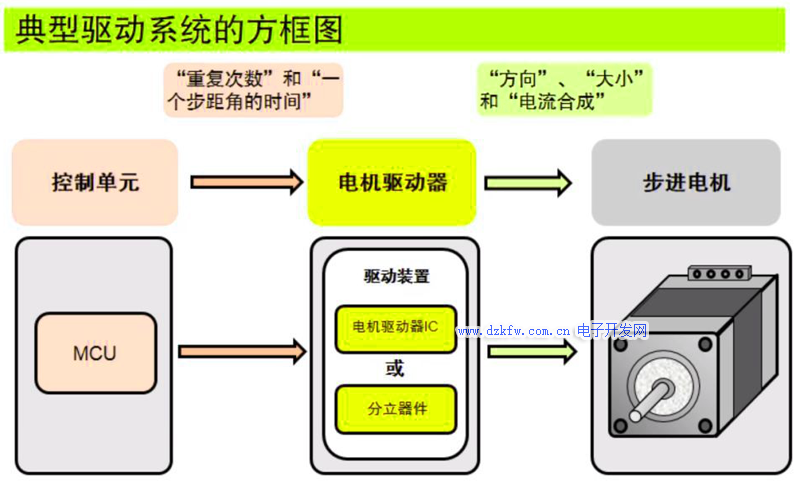
“īäėå╬į¬┼c▓Į▀MļŖÖCų▒Įė±Ņ║ŽŻ¼ę▓┐╔ęį└ĒĮŌ│╔▓Į▀MļŖÖC╬óÖC┐žųŲŲ„Ą─╣”┬╩Įė┐┌ĪŻŽ┬├µīó╩╣ė├MCU║═Ęųļxį¬Ų„╝■Ą─ŽĄĮy┼e└²šf├„ĪŻMCUŽÓ«öė┌╩Ū┐žųŲļŖÖCĄ─┤¾─XŻ¼╦³Ž“Ęų┴óŲ„╝■░l╦═ļŖÖCĄ─▓ĮŠÓĮŪĢrķgĪó▐DäėĘĮŽ“║═ųžÅ═┤╬öĄĄ╚Ż¼Č°Ęų┴óŲ„╝■Ė∙ō■MCU░l│÷Ą─ą┼╠¢Ż¼īóĘ┼┤¾ļŖē║║═ļŖ┴„▓óīóŲõ░l╦═ų┴ļŖÖCŻ¼Å─Č°“īäėļŖÖC▐DäėĪŻ
╚ń╔ŽłD╦∙╩ŠŻ¼įōŽĄĮy╩╣ė├┴╦MCU║═ļŖÖC┐žųŲ“īäėŲ„ICĪŻÅ─▌ö╚ļ┐žųŲą┼╠¢üĒģ^ĘųŻ¼▓Į▀MļŖÖC┐žųŲŲ„IC┐╔ęįĘų×ķŽÓ╚ļ┴”ą═║═ĢrńŖ╚ļ┴”ą═ĪŻŽÓ╚ļ┴”ą═╩ŪųĖļŖÖCĄ─├┐éĆäŅ┤┼ŽÓĄ─ļŖ┴„ĘĮŽ“ė╔▌ö╚ļą┼╠¢┐žųŲŻ¼Č°ĢrńŖ╚ļ┴”ą═╩ŪųĖļŖÖCĄ─“īäėė╔├}ø_ą┼╠¢üĒ┐žųŲĪŻ
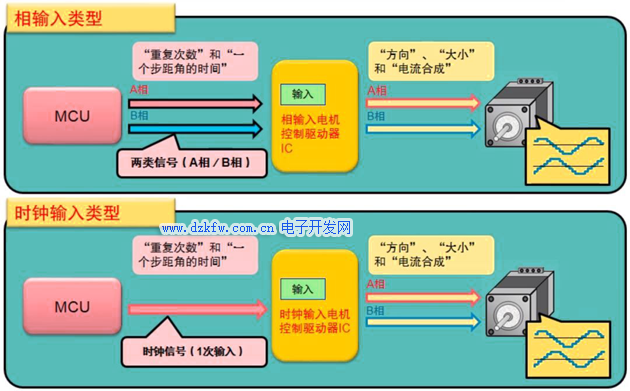
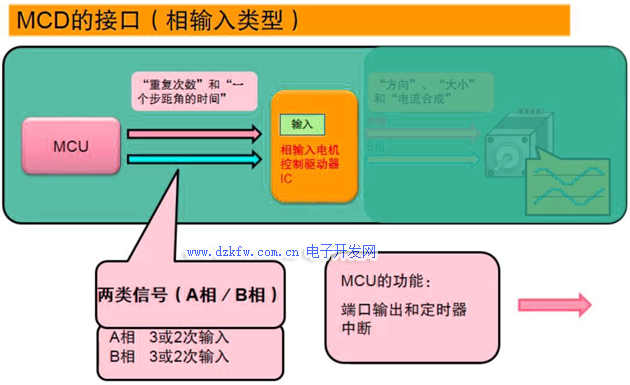
ŽÓ╚ļ┴”ą═
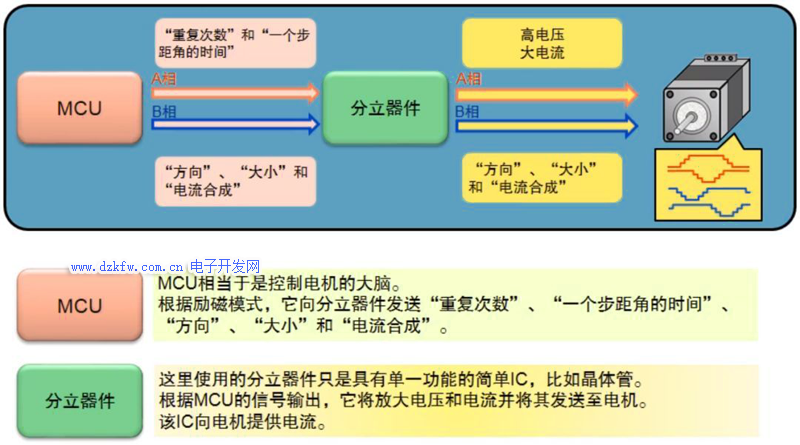
ŽÓ╚ļ┴”ą═ļŖÖC“īäėŲ„ąĶę¬A║═Bā╔ŽÓĄ─┐žųŲą┼╠¢Ż¼ų╗ąĶę¬ĢrńŖą┼╠¢Ż¼ąĶę¬┐žųŲą┼╠¢Ą─MCUū÷Ė³ČÓĄ─▀\▌ö╣żū„ĪŻ
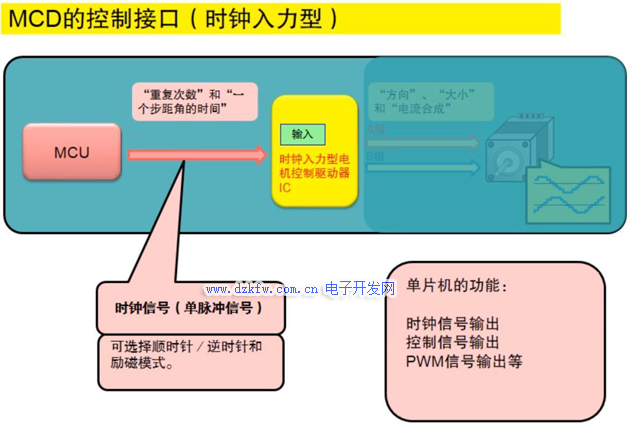
ĢrńŖ╚ļ┴”ą═
ĢrńŖ╚ļ┴”ą═ļŖÖC“īäėŲ„Ą─┐žųŲĮė┐┌Ż¼ąĶę¬ĢrńŖą┼╠¢Ż©å╬├}ø_ą┼╠¢Ż®▌ö╚ļŻ¼Ųõ┐žųŲą┼╠¢ŽÓī”║åå╬Ż¼MCUĄ─┘Yį┤š╝ė├▌^╔┘ĪŻ
07
ļŖÖC“īäė░▓╚½╝╝ąg
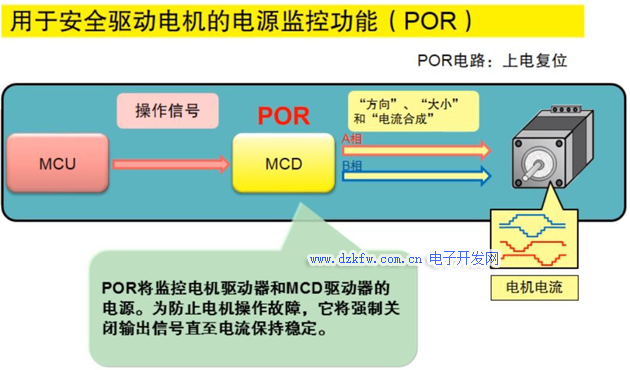
╔ŽļŖÅ═╬╗╣”─▄Ż©PORŻ®
╔ŽļŖÅ═╬╗╣”─▄īó▒O┐žļŖÖC“īäėŲ„Ż¼ęį╝░ļŖÖC“īäė┐žųŲŲ„Ą─ļŖį┤ĪŻ×ķĘ└ų╣ļŖÖC▓┘ū„╣╩šŽŻ¼╦³īóÅŖųŲĻPķ]▌ö│÷ą┼╠¢ų▒ų┴╣®ļŖļŖē║▒Ż│ųĘĆČ©ĪŻ╚ńŽ┬łD╦∙╩ŠĪŻ
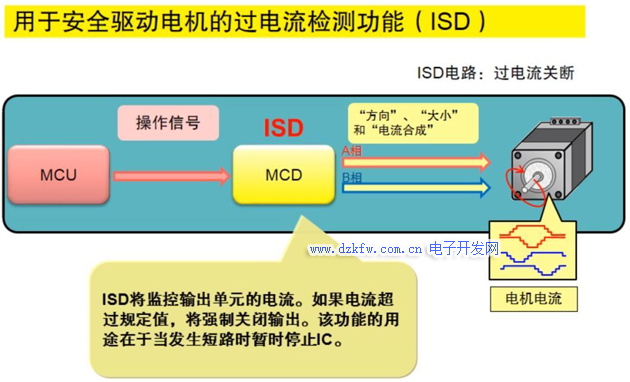
▀^ļŖ┴„Öz£y╣”─▄Ż©ISDŻ®
▀^ļŖ┴„ĻPöÓ╣”─▄īó▒O┐ž▌ö│÷å╬į¬Ą─ļŖ┴„Ż¼╚ń╣¹ļŖ┴„│¼▀^ęÄČ©ųĄŻ¼īóÅŖųŲĻPķ]▌ö│÷Ż¼įō╣”─▄Ą─ė├═Šį┌ė┌«ö░l╔·Č╠┬ĘĢrĢ║Ģr═Żų╣IC▌ö│÷ĪŻ╚ńŽ┬łD╦∙╩ŠĪŻ
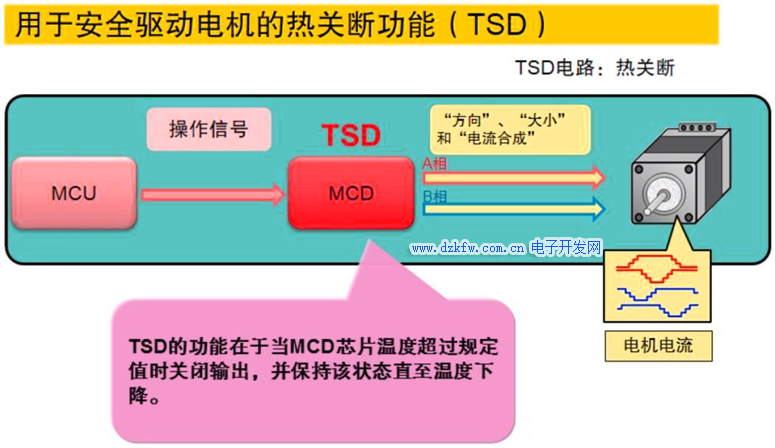
¤ßĻPöÓ╣”─▄Ż©TSDŻ®
¤ßĻPöÓ╣”─▄į┌ė┌Ż¼«öļŖÖC┐žųŲ“īäėŲ„ąŠŲ¼£žČ╚│¼▀^ęÄČ©ųĄĢrĻPķ]▌ö│÷Ż¼▓ó▒Ż│ųįōĀŅæBų▒ų┴£žČ╚Ž┬ĮĄĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū