
ĻPė┌Arduino┐žųŲȵÖCį┌ęį═∙Ą─╬─š┬ųąęčėąĮķĮBŻ¼╚ń║╬═©▀^Arduino╩╣ė├šZę¶├³┴Ņ┐žųŲ╦┼Ę■ļŖÖCĪó└¹ė├Nodemcu┐žųŲSG90ȵÖCĪó└¹ė├MPU6050üĒ┐žųŲȵÖCĄ╚Ą╚Ż¼Ą½╩Ū▀@ą®╬─š┬Č╝╩Ū╗∙ė┌å╬ę╗ȵÖCĄ─┐žųŲŻ¼ę▓Š═╩Ūšf╬ęéā┐žųŲę╗éĆȵÖC╩Ū║▄╚▌ęūīŹ¼FĄ─Ż¼─Ū╝┘╚ń╬ęéāąĶę¬═¼Ģr┐žųŲā╔éĆĪó╚²éĆ╔§ų┴Ė³ČÓĄ─ȵÖCĢrįōį§├┤▐k─žŻ┐
į┌▒Š╬─ųąŻ¼╬ęéāīóŽ“─·š╣╩Š╚ń║╬╩╣ė├ArduinoüĒ┐žųŲČÓéĆȵÖCĪŻė├Arduino▀BĮėå╬éĆȵļŖÖC╩Ū║▄╚▌ęūŻ¼Ą½╩Ū╚ń╣¹╬ęéā░č╦∙ėąĄ─ȵÖCČ╝▀BĮėĄĮArduinoĄ─ļŖį┤ę²─_╔ŽŻ¼╦³éāŠ═▓╗─▄š²│Ż╣żū„┴╦Ż¼ę“×ķArduinoĄ─ļŖ┴„▓╗ūŃęį“īäė╦∙ėąČµÖCĪŻę“┤╦Ż¼╩╣ė├ArduinoüĒ┐žųŲČÓéĆȵÖCŻ¼─Ń▒žĒÜ╩╣ė├å╬¬ÜĄ─ļŖį┤ĪŻ╚ńŻ¼5v-2AĄ─¬Ü┴óļŖį┤╗“9vĄ─ļŖ│žĪŻ
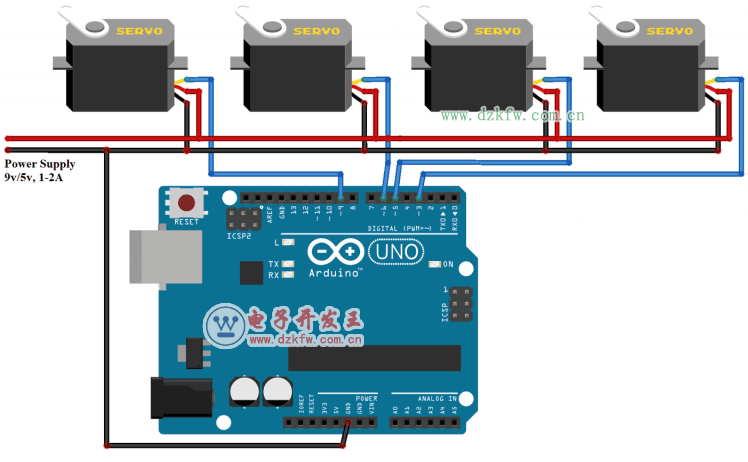
Arduino═¼Ģr┐žųŲČÓéĆȵÖCĄ─ļŖ┬ĘłD
╩▓├┤╩ŪȵÖCŻ┐
ėąĄ─┼¾ėčī”ȵÖC▀Ć║▄─░╔·Ż¼ČµÖC╩Ū═©╦ūĄ─ĮąĘ©Ż¼╦³Ą─š²╩Į├¹ūųĮą╦┼Ę■ļŖÖCĪŻĮ©ūh▓ķ┐┤ęįŪ░Ą─ÄūŲ¬╬─š┬╔Ņ╚ļ┴╦ĮŌŽ┬Ż║
╦┼Ę■ļŖÖCĄ─ĘųŅÉ╝░æ¬ė├
╦┼Ę■ļŖÖC╩Ū╚ń║╬╣żū„Ą─Ż┐
╩▓├┤╩ŪPWMŻ║├}ø_īÆČ╚š{ųŲ
├ļȫȵÖCĮŪČ╚┐žųŲįŁ└Ē
Arduino┐žųŲČÓéĆȵÖC┤·┤aĮŌ╬÷
Arduinoėąå╬¬ÜĄ─ȵÖCų¦│ųÄņŻ¼▀@éĆÄņ┐╔ęį╠Ä└Ē╦∙ėą┼cPWM┐žųŲŽÓĻPĄ─╣żū„Ż¼ę▓┐╔ęįė├üĒ┐žųŲȵÖCŻ¼╩╣ė├▀@éĆÄņŻ¼╬ęéāų╗ąĶę¬į┌servo1.write(angle); ║»öĄųą▌ö╚ļŽļꬹ²▐DĄ─ĮŪČ╚Ż¼Š═┐╔ęįīóȵÖCą²▐DĄĮ╦∙ąĶĮŪČ╚┴╦ĪŻ
ę“┤╦Ż¼ķ_╩╝╬ęéāąĶę¬ę²╚ļȵÖCĄ─Äņ╬─╝■ĪŻ
#include <Servo.h>
į┌Ž┬├µĄ─┤·┤aųąŻ¼╬ęéāīó│§╩╝╗»╦─éĆȵÖCŻ¼╦³éāĘųäe╩ŪServo1ĪóServo2ĪóServo3║═Servo4ĪŻ
Servo servo1; Servo servo2; Servo servo3; Servo servo4;
ĮėŽ┬üĒŻ¼įOų├ȵÖCĄ─▌ö╚ļę²─_ĪŻ╚ńŽ┬├µĄ─┤·┤a╦∙╩ŠŻ¼Servo1▀BĮėĄĮArduinoĄ─Ą┌╚²éĆę²─_ĪŻ─Ńę▓┐╔ęįĖ∙ō■ūį╝║Ą─ąĶę¬Ė³Ė─ę²─_ą“╠¢Ż¼Ą½šłėøūĪę²─_▒žĒÜų¦│ųPWMŻ¼╩╣ė├Ą─ArduinoöĄūųę²─_Ģ■ī¦ų┬╣żū„▓╗ĘĆČ©ĪŻ
void setup() {
servo1.attach(3);
servo2.attach(5);
servo3.attach(6);
servo4.attach(9);
}
¼Fį┌Ż¼į┌void loop()║»öĄųąŻ¼īó╦∙ėąĄ─ȵÖCÅ─0Č╚ą²▐DĄĮ180Č╚Ż¼╚╗║¾Å─180Č╚ą²▐DĄĮ0Č╚ĪŻŽ┬┴ą┤·┤aųą╩╣ė├Ą─čė▀tĢrķg╩Ūė├üĒį÷╝ė╗“£p╔┘ȵÖCĄ─Ēææ¬╦┘Č╚Ą─Ż¼ę“×ķčė▀tĢrķgų▒Įėė░ĒæĄĮūā┴┐ i Ą─į÷╝ė╗“£p╔┘ĪŻ
void loop() {
for (int i = 0; i < 180; i++) {
servo1.write(i);
servo2.write(i);
servo3.write(i);
servo4.write(i);
delay(10);
}
for (i = 180; i > 0; i--) {
servo1.write(i);
servo2.write(i);
servo3.write(i);
servo4.write(i);
delay(10);
}
}
Arduino┐žųŲČÓéĆȵÖCĄ─═Ļš¹┤·┤a╚ńŽ┬Ż║
#include <Servo.h>
Servo servo1;
Servo servo2;
Servo servo3;
Servo servo4;
int i = 0;
void setup() {
servo1.attach(3);
servo2.attach(5);
servo3.attach(6);
servo4.attach(9);
}
void loop() {
for (i = 0; i < 180; i++) {
servo1.write(i);
servo2.write(i);
servo3.write(i);
servo4.write(i);
delay(10);
}
for (i = 180; i > 0; i--) {
servo1.write(i);
servo2.write(i);
servo3.write(i);
servo4.write(i);
delay(10);
}
}
ąĶę¬ūóęŌĄ─╩ŪŻ¼«ö╩╣ė├═Ō▓┐ļŖį┤ī”ȵÖC╣®ļŖĢrŻ¼ąĶę¬īó═Ō▓┐ļŖį┤Ą─GND┼cArduinoĄ─GND▀BĮėŲüĒŻ¼ą╬│╔ļŖ┬ĘĄ─Ą╚ļŖ╬╗▀BĮėŻ¼Ę±ätĢ■įņ│╔▀\ąą▓╗ĘĆČ©╗“┤µį┌Ė╔ö_ĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū