
į┌ūįäė╗»įO(sh©©)éõųąŻ¼Įø(j©®ng)│Żė├ĄĮ╦┼Ę■ļŖÖCŻ¼╠žäe╩ŪĘĮ╬╗▓┘┐žŻ¼┤¾▓┐ĘųŲĘ┼ŲĄ─╦┼Ę■ļŖÖCČ╝ėąĘĮ╬╗▓┘┐ž╣”ė├Ż¼Įø(j©®ng)▀^▓┘┐žŲ„░l(f©Ī)│÷├}ø_üĒ▓┘┐ž╦┼Ę■ļŖÖC▀\▐D(zhu©Żn)Ż¼├}ø_öĄ(sh©┤)ī”æ¬(y©®ng)▐D(zhu©Żn)Ą─ĮŪČ╚Ż¼├}ø_Ņl┬╩ī”æ¬(y©®ng)╦┘Č╚Ż©┼cļŖūė²X▌åįO(sh©©)Č©ėąĻP(gu©Īn)Ż®Ż¼«ö(d©Īng)ę╗éĆą┬Ą─¾wŽĄŻ¼ģóöĄ(sh©┤)▓╗─▄╣żū„ĢrŻ¼╩ūę¬įO(sh©©)Č©ĘĮ╬╗į÷굯¼▒ŻūCļŖÖC¤oįļę¶ĀŅørŽ┬Ż¼▒M┴┐įO(sh©©)┤¾ą®Ż¼▐D(zhu©Żn)äėæT┴┐▒╚ę▓ĘŪ│Żųžę¬Ż¼┐╔Įø(j©®ng)▀^ūįīW(xu©”)┴Ģ(x©¬)įO(sh©©)Č©Ą─öĄ(sh©┤)üĒģó┐╝Ż¼╚╗║¾įO(sh©©)Č©╦┘Č╚į÷ęµ║═╦┘Č╚ĘeĘųĢrķgŻ¼▒ŻūCį┌Ą═╦┘▀\▐D(zhu©Żn)Ģr▀B└m(x©┤)Ż¼ĘĮ╬╗Š½Č╚╩▄┐ž╝┤┐╔ĪŻ
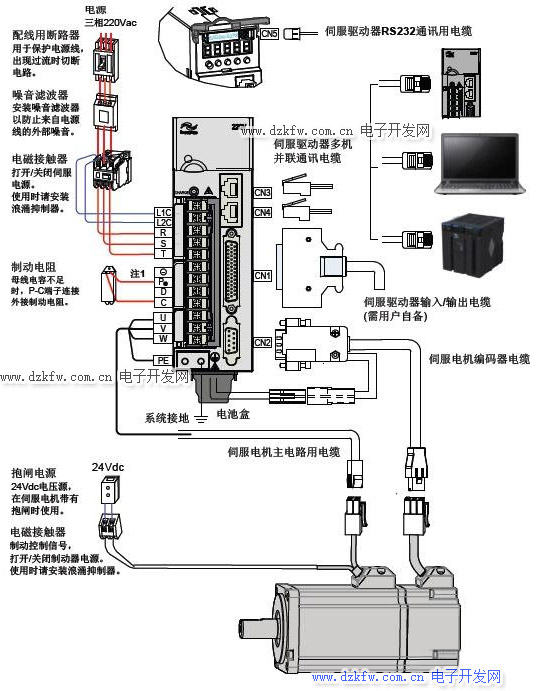
╦┼Ę■“ī(q©▒)äėŲ„ģóöĄ(sh©┤)Č╦┐┌║═╦┼Ę■ļŖÖCĮėŠĆłD╚ńŽ┬Ż║
Ż©1Ż®ĘĮ╬╗Ę▌Ņ~į÷ęµ
įO(sh©©)Č©ĘĮ╬╗Łh(hu©ón)š{(di©żo)╣Ø(ji©”)Ų„Ą─Ę▌Ņ~į÷ęµĪŻįO(sh©©)ų├ųĄįĮ┤¾Ż¼į÷ęµįĮĖ▀Ż¼äéČ╚įĮ┤¾Ż¼ŽÓ═¼Ņl┬╩ųĖ┴Ņ├}ø_Śl╝■Ž┬Ż¼ĘĮ╬╗£■║¾┴┐įĮąĪĪŻĄ½öĄ(sh©┤)ųĄ╠½┤¾╗“įSĢ■ę²Ųš±äė╗“│¼š{(di©żo)ĪŻģóöĄ(sh©┤)öĄ(sh©┤)ųĄė╔įö╝Ü(x©¼)Ą─╦┼Ę■¾wŽĄŅÉą═║═žō(f©┤)▌dĀŅør┤_šJ(r©©n)ĪŻ
Ż©2Ż®ĘĮ╬╗Ū░üį÷ęµ
įO(sh©©)Č©ĘĮ╬╗Łh(hu©ón)Ą─Ū░üį÷ęµĪŻįO(sh©©)Č©ųĄįĮ┤¾ĢrŻ¼▒Ē├„į┌╚╬║╬Ņl┬╩Ą─ųĖ┴Ņ├}ø_Ž┬Ż¼ĘĮ╬╗£■║¾┴┐įĮąĪĘĮ╬╗Łh(hu©ón)Ą─Ū░üį÷ęµ┤¾Ż¼▓┘┐ž¾wŽĄĄ─Ė▀╦┘║¶æ¬(y©®ng)╠žąį╠ßĖ▀Ż¼Ą½Ģ■╩╣¾wŽĄĄ─ĘĮ╬╗▓╗░▓ĘĆ(w©¦n)Ż¼╚▌ęū░l(f©Ī)╔·š±äėĪŻ▓╗ąĶŪ¾║▄Ė▀Ą─║¶æ¬(y©®ng)╠žąįĢrŻ¼▒ŠģóöĄ(sh©┤)═©│ŻįO(sh©©)×ķ0▒Ē├„ęÄ(gu©®)─ŻŻ║0~100%ĪŻ
Ż©3Ż®╦┘Č╚Ę▌Ņ~į÷ęµ
įO(sh©©)Č©╦┘Č╚š{(di©żo)╣Ø(ji©”)Ų„Ą─Ę▌Ņ~į÷ęµĪŻįO(sh©©)ų├ųĄįĮ┤¾Ż¼į÷ęµįĮĖ▀Ż¼äéČ╚įĮ┤¾ĪŻģóöĄ(sh©┤)öĄ(sh©┤)ųĄĖ∙ō■(j©┤)įö╝Ü(x©¼)Ą─╦┼Ę■“ī(q©▒)äė¾wŽĄŅÉą═║═žō(f©┤)▌dųĄĀŅør┤_šJ(r©©n)ĪŻę╗░ŃĀŅørŽ┬Ż¼žō(f©┤)▌dæT┴┐įĮ┤¾Ż¼įO(sh©©)Č©ųĄįĮ┤¾ĪŻį┌¾wŽĄ▓╗░l(f©Ī)╔·š±äėĄ─Śl╝■Ž┬Ż¼▒M┴┐įO(sh©©)Č©▌^┤¾Ą─ųĄĪŻ
Ż©4Ż®╦┘Č╚ĘeĘųĢrķg│ŻöĄ(sh©┤)
įO(sh©©)Č©╦┘Č╚š{(di©żo)╣Ø(ji©”)Ų„Ą─ĘeĘųĢrķg│ŻöĄ(sh©┤)ĪŻįO(sh©©)ų├ųĄįĮąĪŻ¼ĘeĘų╦┘Č╚įĮ┐ņĪŻģóöĄ(sh©┤)öĄ(sh©┤)ųĄĖ∙ō■(j©┤)įö╝Ü(x©¼)Ą─╦┼Ę■“ī(q©▒)äė¾wŽĄŅÉą═║═žō(f©┤)▌dĀŅør┤_šJ(r©©n)ĪŻę╗░ŃĀŅørŽ┬Ż¼žō(f©┤)▌dæT┴┐įĮ┤¾Ż¼įO(sh©©)Č©ųĄįĮ┤¾ĪŻį┌¾wŽĄ▓╗░l(f©Ī)╔·š±äėĄ─Śl╝■Ž┬Ż¼▒M┴┐įO(sh©©)Č©▌^ąĪĄ─ųĄĪŻ
Ż©5Ż®╦┘Č╚Ę┤æ¬(y©®ng)×V▓©ę“ūė
įO(sh©©)Č©╦┘Č╚Ę┤æ¬(y©®ng)Ą══©×V▓©Ų„╠žąįĪŻöĄ(sh©┤)ųĄįĮ┤¾Ż¼Įžų╣Ņl┬╩įĮĄ═Ż¼ļŖÖC░l(f©Ī)╔·Ą─įļę¶įĮąĪĪŻ╝┘╚ńžō(f©┤)▌dæT┴┐║▄┤¾Ż¼┐╔ęį▀m«ö(d©Īng)£pąĪįO(sh©©)Č©ųĄĪŻöĄ(sh©┤)ųĄ╠½┤¾Ż¼ą╬│╔║¶æ¬(y©®ng)ūā┬²Ż¼╗“įSĢ■ę²Ųš±äėĪŻöĄ(sh©┤)ųĄįĮąĪŻ¼Įžų╣Ņl┬╩įĮĖ▀Ż¼╦┘Č╚Ę┤æ¬(y©®ng)║¶æ¬(y©®ng)įĮ┐ņĪŻ╝┘╚ńąĶŪ¾▌^Ė▀Ą─╦┘Č╚║¶æ¬(y©®ng)Ż¼┐╔ęį▀m«ö(d©Īng)£pąĪįO(sh©©)Č©ųĄĪŻ
Ż©6Ż®ūŅ┤¾▌ö│÷▐D(zhu©Żn)ŠžįO(sh©©)ų├
įO(sh©©)ų├╦┼Ę■“ī(q©▒)äėŲ„Ą─ā╚(n©©i)▓┐▐D(zhu©Żn)Šž╝s╩°ųĄĪŻįO(sh©©)ų├ųĄ╩ŪŅ~Č©▐D(zhu©Żn)ŠžĄ─░┘Ęų▒╚Ż¼╚╬║╬Ģr║“Ż¼▀@éĆ╝s╩°Č╝ėąė├Č©╬╗═ĻĮY(ji©”)ęÄ(gu©®)─ŻįO(sh©©)Č©ĘĮ╬╗▓┘┐žĘĮĘ©Ž┬Č©╬╗═ĻĮY(ji©”)├}ø_ęÄ(gu©®)─ŻĪŻ▒ŠģóöĄ(sh©┤)╣®Įo┴╦ĘĮ╬╗▓┘┐žĘĮĘ©Ž┬“ī(q©▒)äėŲ„┼ąäe╩Ūʱ═ĻĮY(ji©”)Č©╬╗Ą─Ė∙ō■(j©┤)Ż¼«ö(d©Īng)ĘĮ╬╗Ų½▓ŅėŗöĄ(sh©┤)Ų„ā╚(n©©i)Ą─╩ŻėÓ├}ø_öĄ(sh©┤)ąĪė┌╗“Ą╚ė┌▒ŠģóöĄ(sh©┤)įO(sh©©)Č©ųĄĢrŻ¼“ī(q©▒)äėŲ„šJ(r©©n)×ķČ©╬╗ęč═ĻĮY(ji©”)Ż¼ĄĮ╬╗ķ_ĻP(gu©Īn)ą┼╠¢×ķONŻ¼Ę±ät×ķOFFĪŻ
į┌ĘĮ╬╗▓┘┐žĘĮĘ©ĢrŻ¼▌ö│÷ĘĮ╬╗Č©╬╗═ĻĮY(ji©”)ą┼╠¢Ż¼╝ė£p╦┘Ģrķg│ŻöĄ(sh©┤)įO(sh©©)ų├ųĄ╩Ū▒Ē├„ļŖÖCÅ─0~2000r/minĄ─╝ė╦┘Ģrķg╗“Å─2000~0r/minĄ─£p╦┘ĢrķgĪŻ╝ė£p╦┘╠žąį╩ŪŠĆąįĄ─Ąų▀_╦┘Č╚ęÄ(gu©®)─ŻįO(sh©©)ų├Ąų▀_╦┘Č╚į┌ĘŪĘĮ╬╗▓┘┐žĘĮĘ©Ž┬Ż¼╝┘╚ń╦┼Ę■ļŖÖC╦┘Č╚│¼▀^▒ŠįO(sh©©)Č©ųĄŻ¼ät╦┘Č╚Ąų▀_ķ_ĻP(gu©Īn)ą┼╠¢×ķONŻ¼Ę±ät×ķOFFĪŻį┌ĘĮ╬╗▓┘┐žĘĮĘ©Ž┬Ż¼▓╗▒ž┤╦ģóöĄ(sh©┤)ĪŻ┼cą²▐D(zhu©Żn)ĘĮŽ“¤oĻP(gu©Īn)ĪŻ
Ż©7Ż®╩ųäėš{(di©żo)š¹į÷ęµģóöĄ(sh©┤)
š{(di©żo)š¹╦┘Č╚Ę▌Ņ~į÷ęµKVPųĄĪŻ«ö(d©Īng)╦┼Ę■¾wŽĄ░▓čb═Ļ║¾Ż¼ėą▒žę¬š{(di©żo)š¹ģóöĄ(sh©┤)Ż¼╩╣¾wŽĄ░▓ĘĆ(w©¦n)ą²▐D(zhu©Żn)ĪŻ╩ū꬚{(di©żo)š¹╦┘Č╚Ę▌Ņ~į÷ęµKVPųĄĪŻš{(di©żo)š¹ų«Ū░ėą▒žę¬░čĘeĘųį÷ęµKVI╝░╬óĘųį÷ęµKVDš{(di©żo)š¹ų┴┴ŃŻ¼╚╗║¾īóKVPųĄųØu╝ė┤¾Ż╗═¼Ģrė^▓ņ╦┼Ę■ļŖÖCųąų╣ĢrūŃʱ░l(f©Ī)╔·š±äėŻ¼Č°Ūęęį╩ųäėĘĮĘ©š{(di©żo)š¹KVPģóöĄ(sh©┤)Ż¼ė^▓ņą²▐D(zhu©Żn)╦┘Č╚╩Ūʱ├„’@║÷┐ņ║÷┬²ĪŻKVPųĄ╝ė┤¾ĄĮ░l(f©Ī)╔·ęį╔Ž¼F(xi©żn)Ž¾ĢrŻ¼ėą▒žę¬īóKVPųĄ═∙╗žš{(di©żo)ąĪŻ¼╩╣š±äėŽ¹│²Īóą²▐D(zhu©Żn)╦┘Č╚░▓ĘĆ(w©¦n)ĪŻ┤╦ĢrĄ─KVPųĄ╝┤ķ_╩╝┤_šJ(r©©n)Ą─ģóöĄ(sh©┤)ųĄĪŻ╚ńėą▒žę¬Ż¼Įø(j©®ng)Kó÷║═KVDš{(di©żo)š¹║¾Ż¼┐╔į┘ū„Ę┤Å═(f©┤)ą▐š²ęįĄĮ▀_└ĒŽļųĄĪŻ
š{(di©żo)š¹ĘeĘųį÷ęµKó÷ųĄĪŻīóĘeĘųį÷ęµKVIųĄųØu╝ė┤¾Ż¼╩╣ĘeĘųą¦æ¬(y©®ng)ųØu░l(f©Ī)╔·ĪŻė╔Ū░╩÷ī”ĘeĘų▓┘┐žĄ─ĮķĮB┐╔┐┤│÷Ż¼KVPųĄ║Žū„ĘeĘųą¦æ¬(y©®ng)į÷╝ėĄĮ┼RĮńųĄ║¾īó░l(f©Ī)╔·š±äėČ°▓╗░▓ĘĆ(w©¦n)Ż¼║├Ž±KVPųĄę╗śėŻ¼īóKVIųĄ═∙╗žš{(di©żo)ąĪŻ¼╩╣š±äėŽ¹│²Īóą²▐D(zhu©Żn)╦┘Č╚░▓ĘĆ(w©¦n)ĪŻ┤╦ĢrĄ─KVIųĄ╝┤ķ_╩╝┤_šJ(r©©n)Ą─ģóöĄ(sh©┤)ųĄĪŻ
š{(di©żo)š¹╬óĘųį÷ęµKVDųĄĪŻ╬óĘųį÷ęµ╩ūę¬─┐Ą─╩Ū╩╣╦┘Č╚ą²▐D(zhu©Żn)ŲĮĘĆ(w©¦n)Ż¼ĮĄĄ═│¼š{(di©żo)┴┐ĪŻę“┤╦Ż¼īóKVDųĄųØu╝ė┤¾┐╔Ė─╔Ų╦┘Č╚░▓ĘĆ(w©¦n)ąįĪŻ
š{(di©żo)š¹ĘĮ╬╗Ę▌Ņ~į÷ęµKPPųĄĪŻ╝┘╚ńKPPųĄš{(di©żo)š¹▀^┤¾Ż¼╦┼Ę■ļŖÖCČ©╬╗Ģrīó░l(f©Ī)╔·ļŖÖCČ©╬╗│¼š{(di©żo)┴┐▀^┤¾Ż¼ą╬│╔▓╗░▓ĘĆ(w©¦n)¼F(xi©żn)Ž¾ĪŻ┤╦ĢrŻ¼ėą▒žę¬š{(di©żo)ąĪKPPųĄŻ¼ĮĄĄ═│¼š{(di©żo)┴┐╝░▒▄ķ_▓╗░▓ĘĆ(w©¦n)ģ^(q©▒)Ż╗Ą½ę▓▓╗─▄š{(di©żo)š¹╠½ąĪŻ¼╩╣Č©╬╗╣”┬╩ĮĄĄ═ĪŻę“┤╦Ż¼š{(di©żo)š¹Ģræ¬(y©®ng)ąĪą─║Žū„ĪŻ
Ż©8Ż®ūįäėš{(di©żo)š¹į÷ęµģóöĄ(sh©┤)
¼F(xi©żn)┤·╦┼Ę■“ī(q©▒)äėŲ„Š∙ęč╬óėŗ╦ŃÖC╗»Ż¼┤¾▓┐Ęų╣®Įoūįäėį÷굚{(di©żo)š¹Ż©autotuningŻ®Ą─╣”ė├Ż¼┐╔Ę¾č▄ČÓöĄ(sh©┤)žō(f©┤)▌dĀŅørĪŻį┌ģóöĄ(sh©┤)š{(di©żo)š¹ĢrŻ¼┐╔Ž╚╩╣ė├ūįäėģóöĄ(sh©┤)š{(di©żo)š¹╣”ė├Ż¼▒žę¬Ģrį┘╩ųäėš{(di©żo)š¹ĪŻ
╩┬īŹ╔ŽŻ¼ūįäėį÷굚{(di©żo)š¹ę▓ėą▀xĒŚįO(sh©©)ų├Ż¼ę╗░Ńīó▓┘┐ž║¶æ¬(y©®ng)Ęų×ķÄūéĆĄ╚╝ēŻ¼╚ńĖ▀║¶æ¬(y©®ng)Īóųą║¶æ¬(y©®ng)ĪóĄ═║¶æ¬(y©®ng)Ż¼ė├æ¶┐╔Ė∙ō■(j©┤)īŹļHąĶŪ¾▀MąąįO(sh©©)ų├ĪŻ
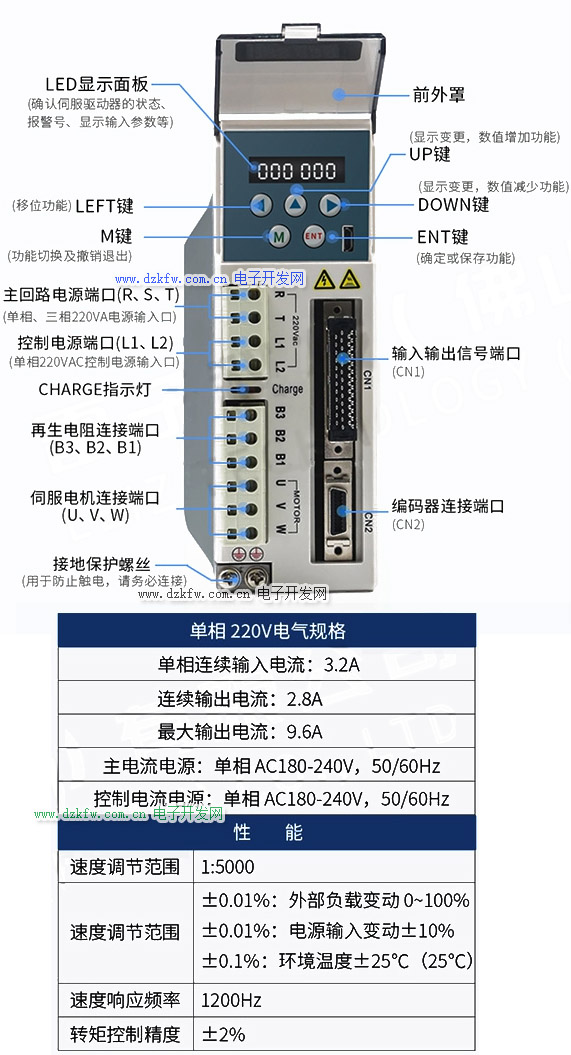
╦┼Ę■ļŖÖCĮėŠĆłD╚ńŽ┬Ż║
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū