
ŠÄš▀░┤Ż║▓Į▀M(j©¼n)ļŖÖC(j©®)╩Ūę╗ĘNīóļŖ├}ø_ą┼╠¢(h©żo)▐D(zhu©Żn)ōQ│╔ŽÓæ¬(y©®ng)ĮŪ╬╗ęŲ╗“ŠĆ╬╗ęŲĄ─ļŖäė(d©░ng)ÖC(j©®)ĪŻ├┐▌ö╚ļę╗éĆ(g©©)├}ø_ą┼╠¢(h©żo)Ż¼▐D(zhu©Żn)ūėŠ═▐D(zhu©Żn)äė(d©░ng)ę╗éĆ(g©©)ĮŪČ╚╗“Ū░▀M(j©¼n)ę╗▓ĮŻ¼Ųõ▌ö│÷Ą─ĮŪ╬╗ęŲ╗“ŠĆ╬╗ęŲ┼c▌ö╚ļĄ─├}ø_öĄ(sh©┤)│╔š²▒╚Ż¼▐D(zhu©Żn)╦┘┼c├}ø_Ņl┬╩│╔š²▒╚ĪŻę“┤╦Ż¼▓Į▀M(j©¼n)ļŖäė(d©░ng)ÖC(j©®)ėųĘQ├}ø_ļŖäė(d©░ng)ÖC(j©®)ĪŻ×ķ┤╦Ż¼ąĪŠÄ▐D(zhu©Żn)░l(f©Ī)ļŖūėšf(shu©Ł)░l(f©Ī)▓╝Ą─ĪČ▓Į▀M(j©¼n)ļŖÖC(j©®)ėąø](m©”i)ėąŠÄ┤aŲ„?▓Į▀M(j©¼n)ļŖÖC(j©®)╚ń║╬╝ėŠÄ┤aŲ„ĪĘŻ¼āH╣®ūxš▀ģó┐╝ĪŻ
▓Į▀M(j©¼n)ļŖÖC(j©®)╣żū„įŁ└Ē
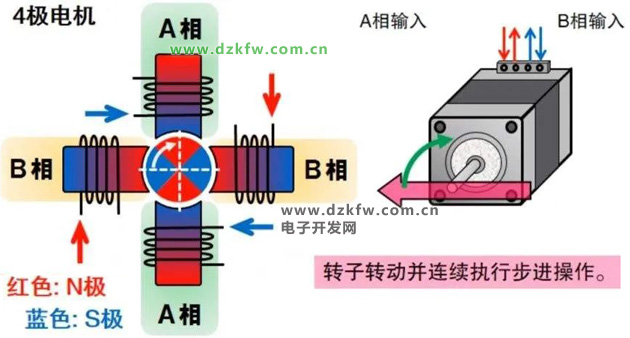
«ö(d©Īng)ļŖ┴„┴„▀^(gu©░)Č©ūė└@ĮMĢr(sh©¬)Ż¼Č©ūė└@ĮM«a(ch©Żn)╔·ę╗╩Ė┴┐┤┼ł÷(ch©Żng)ĪŻįō┤┼ł÷(ch©Żng)Ģ■(hu©¼)Ħäė(d©░ng)▐D(zhu©Żn)ūėą²▐D(zhu©Żn)ę╗ĮŪČ╚Ż¼╩╣Ą├▐D(zhu©Żn)ūėĄ─ę╗ī”(du©¼)┤┼ł÷(ch©Żng)ĘĮŽ“┼cČ©ūėĄ─┤┼ł÷(ch©Żng)ĘĮŽ“ę╗ų┬ĪŻ«ö(d©Īng)Č©ūėĄ─╩Ė┴┐┤┼ł÷(ch©Żng)ą²▐D(zhu©Żn)ę╗éĆ(g©©)ĮŪČ╚ĪŻ▐D(zhu©Żn)ūėę▓ļSų°įō┤┼ł÷(ch©Żng)▐D(zhu©Żn)ę╗éĆ(g©©)ĮŪČ╚ĪŻ├┐▌ö╚ļę╗éĆ(g©©)ļŖ├}ø_Ż¼ļŖäė(d©░ng)ÖC(j©®)▐D(zhu©Żn)äė(d©░ng)ę╗éĆ(g©©)ĮŪČ╚Ū░▀M(j©¼n)ę╗▓ĮĪŻ╦³▌ö│÷Ą─ĮŪ╬╗ęŲ┼c▌ö╚ļĄ─├}ø_öĄ(sh©┤)│╔š²▒╚Īó▐D(zhu©Żn)╦┘┼c├}ø_Ņl┬╩│╔š²▒╚ĪŻĖ─ūā└@ĮM═©ļŖĄ─Ēśą“Ż¼ļŖÖC(j©®)Š═Ģ■(hu©¼)Ę┤▐D(zhu©Żn)ĪŻ╦∙ęį┐╔ė├┐žųŲ├}ø_öĄ(sh©┤)┴┐ĪóŅl┬╩╝░ļŖäė(d©░ng)ÖC(j©®)Ė„ŽÓ└@ĮMĄ─═©ļŖĒśą“üĒ(l©ói)┐žųŲ▓Į▀M(j©¼n)ļŖÖC(j©®)Ą─▐D(zhu©Żn)äė(d©░ng)ĪŻ
═©│ŻęŖ(ji©żn)ĄĮĄ─Ė„ŅÉļŖÖC(j©®)Ż¼ā╚(n©©i)▓┐Č╝╩ŪėąĶFąŠ║═└@ĮMŠĆ╚”Ą─ĪŻ└@ĮMėąļŖūĶŻ¼═©ļŖĢ■(hu©¼)«a(ch©Żn)╔·ōp║─Ż¼ōp║─┤¾ąĪ┼cļŖūĶ║═ļŖ┴„Ą─ŲĮĘĮ│╔š²▒╚Ż¼▀@Š═╩Ū╬ęéā│Żšf(shu©Ł)Ą─Ń~ōpŻ¼╚ń╣¹ļŖ┴„▓╗╩Ūś╦(bi©Īo)£╩(zh©│n)Ą─ų▒┴„╗“š²Žę▓©Ż¼▀ĆĢ■(hu©¼)«a(ch©Żn)╔·ųC▓©ōp║─;ĶFą─ėą┤┼£■£u┴„ą¦æ¬(y©®ng)Ż¼į┌Į╗ūā┤┼ł÷(ch©Żng)ųąę▓Ģ■(hu©¼)«a(ch©Żn)╔·ōp║─Ż¼Ųõ┤¾ąĪ┼c▓─┴ŽŻ¼ļŖ┴„Ż¼Ņl┬╩Ż¼ļŖē║ėąĻP(gu©Īn)Ż¼▀@ĮąĶFōpĪŻ
Ń~ōp║═ĶFōpČ╝Ģ■(hu©¼)ęį░l(f©Ī)¤ßĄ─ą╬╩Į▒Ē¼F(xi©żn)│÷üĒ(l©ói)Ż¼Å─Č°ė░ĒæļŖÖC(j©®)Ą─ą¦┬╩ĪŻ▓Į▀M(j©¼n)ļŖÖC(j©®)ę╗░ŃūĘŪ¾Č©╬╗Š½Č╚║═┴”Šž▌ö│÷Ż¼ą¦┬╩▒╚▌^Ą═Ż¼ļŖ┴„ę╗░Ń▒╚▌^┤¾Ż¼ŪęųC▓©│╔ĘųĖ▀Ż¼ļŖ┴„Į╗ūāĄ─Ņl┬╩ę▓ļS▐D(zhu©Żn)╦┘Č°ūā╗»Ż¼ę“Č°▓Į▀M(j©¼n)ļŖÖC(j©®)Ųš▒ķ┤µį┌░l(f©Ī)¤ßŪķørŻ¼ŪęŪķør▒╚ę╗░ŃĮ╗┴„ļŖÖC(j©®)ć└(y©ón)ųžĪŻ
▓Į▀M(j©¼n)ļŖÖC(j©®)ėąø](m©”i)ėąŠÄ┤aŲ„
▓Į▀M(j©¼n)ļŖÖC(j©®)ø](m©”i)ėąŠÄ┤aŲ„ ╚ń╣¹─ŃŽļį┌▓Į▀M(j©¼n)ļŖÖC(j©®)╔Ž╝ėŠÄ┤aŲ„Ż¼┐╔ęįė├▓Į▀M(j©¼n)ļŖÖC(j©®)ļp▌S╔ņŻ¼į┌║¾├µ▌S╔Ž├µ╝ėŠÄ┤aŲ„ĪŻ
▓Į▀M(j©¼n)ļŖÖC(j©®)╩Ūł╠(zh©¬)ąąįŁ╝■Ż¼ŠÄ┤aŲ„ī┘ė┌Ę┤üŽĄĮy(t©»ng)Ż¼ŠÄ┤aŲ„┼õ║Ž▓Į▀M(j©¼n)ļŖÖC(j©®)╩╣ė├Ż¼ė├PLC┐žųŲŲõ▀\(y©┤n)ąąĪŻ░┤ššįŁ└ĒüĒ(l©ói)ųv╩ŪPLC░l(f©Ī)╦═├}ø_ųĖ┴ŅĮo▓Į▀M(j©¼n)“ī(q©▒)äė(d©░ng)Ų„Ż¼“ī(q©▒)äė(d©░ng)Ų„Įo▓Į▀M(j©¼n)ļŖÖC(j©®)╠ß╣®ŽÓæ¬(y©®ng)ļŖ┴„╩╣Ųõ▀\(y©┤n)ąąŻ¼«ö(d©Īng)ŠÄ┤aŲ„Öz£y(c©©)ĄĮ▓Į▀M(j©¼n)ļŖÖC(j©®)▀\(y©┤n)ąąĄĮąĶꬥĮ▀_(d©ó)Ą─╬╗ų├Ą─Ģr(sh©¬)║“Ģ■(hu©¼)Ę┤üą┼╠¢(h©żo)ĮoPLCŻ¼PLC░▓čbĘ┤üĄ─ą┼╠¢(h©żo)═Żų╣░l(f©Ī)╦═├}ø_ą┼╠¢(h©żo)Įo▓Į▀M(j©¼n)“ī(q©▒)äė(d©░ng)Ų„Ż¼«ö(d©Īng)▓Į▀M(j©¼n)ļŖÖC(j©®)ø](m©”i)ėą┴╦ļŖäė(d©░ng)įŁ╠ß╣®ļŖ┴„«ö(d©Īng)╚╗ę▓Ģ■(hu©¼)┴ó┐╠═Żų╣▀\(y©┤n)ąąĪŻ(╦┼Ę■ļŖÖC(j©®)Š═╩Ū┤╦ĘNčbų├)Ż¼ŲõīŹ(sh©¬)ŠÄ┤aŲ„Ģ■(hu©¼)▓╗═ŻĄ─Ę┤ü«ö(d©Īng)Ū░╬╗ų├ĮoPLCŻ¼PLCĖ∙ō■(j©┤)Ę┤üųĄ┼c─┐ś╦(bi©Īo)ųĄ▀M(j©¼n)ąą▒╚▌^Ż¼š{(di©żo)š¹▐D(zhu©Żn)ūė▐D(zhu©Żn)äė(d©░ng)Ą─ĮŪČ╚ĪŻ
«ö(d©Īng)╚╗Ģ■(hu©¼)▓╗Ģ■(hu©¼)═ŻĘĆ(w©¦n)Ż¼═Żų╣║¾╩Ū▓╗╩Ūūį╝║Žļꬥ─╬╗ų├Ż¼▀@éĆ(g©©)ę¬┐┤ļŖÖC(j©®)ėą¤o(w©▓)ųŲäė(d©░ng)čbų├?«ö(d©Īng)╚╗Ą═╦┘▀\(y©┤n)ąąĄ─įÆŻ¼ę╗░Ń▀M(j©¼n)ĮoŠ½Č╚Č╝─▄ØMūŃĪŻ
▀Ćėąę╗ĘNŠ═╩Ū╠ßŪ░ėŗ(j©¼)╦Ń║├▓Į▀M(j©¼n)ļŖÖC(j©®)▀M(j©¼n)ĮoąĶꬥ─├}ø_öĄ(sh©┤)Ż¼╚╗║¾ė├PLCŠÄ│╠Ż¼▀\(y©┤n)ąą▀@├┤ČÓ├}ø_öĄ(sh©┤)Ż¼▓Į▀M(j©¼n)ļŖÖC(j©®)═Żų╣Ż¼ŠÄ┤aŲ„Ę┤ü┤╦Ģr(sh©¬)ļŖÖC(j©®)╬╗ų├Ż¼ą╬│╔░ļķ]Łh(hu©ón)┐žųŲĪŻ┴Ē═ŌĄ─Ė▀╦┘Č©╬╗Ż¼PLC│╠ą“└’├µŠ═┐╔ęįįO(sh©©)ų├┐ņĄĮ╬╗ų├Ą─Ģr(sh©¬)║“ļŖÖC(j©®)▀M(j©¼n)ąą£p╦┘▀M(j©¼n)ĮoŻ¼┐╔ØMūŃČ©╬╗Š½Č╚ĪŻ
▓Į▀M(j©¼n)ļŖÖC(j©®)╚ń║╬╝ėŠÄ┤aŲ„
▓Į▀M(j©¼n)ļŖÖC(j©®)╝ėŠÄ┤aėą³c(di©Żn)ļu└▀Ż¼Š═╩Ū└╦┘M(f©©i)┘Yį┤;ę“?y©żn)ķ▓Į▀M(j©¼n)ļŖÖC(j©®)ø](m©”i)Ę©īŹ(sh©¬)Ģr(sh©¬)Ēææ¬(y©®ng)Ż¼▒žĒÜėąę╗éĆ(g©©)╝ė╦┘£p╦┘▀^(gu©░)│╠;
└²Ż║ė├ĦųC▓©£p╦┘Ų„Ą─¢|ĘĮ▓Į▀M(j©¼n)±R▀_(d©ó)Ż¼£p╦┘▒╚100:1 ▓ĮŠÓĮŪŻ║0.0072ĪŃŻ¼Žļ╝ėéĆ(g©©)ŠÄ┤aŲ„üĒ(l©ói)Ę└ų╣üG▓ĮĄ╚Ą╚Ż¼ęįŽ┬╩ŪĘĮĘ©Ż║
┤Ż║įŁät╔Žę▓┐╔ęįį┌ĮzĖ▄Ą─ę╗Ņ^čbļŖÖC(j©®)Ż¼┴Ēę╗Ņ^čbŠÄ┤aŲ„ĪŻ▓╗▀^(gu©░)▀@śėĢ■(hu©¼)╩▄ĄĮ£p╦┘ÖC(j©®)Š½Č╚Ą─ė░ĒæŻ¼┐╔─▄│÷¼F(xi©żn)ī”(du©¼)üG▓ĮĄ─š`┼ąĪŻ╝ėŠÄ┤aŲ„ūŅ║├╩Ūļp│÷▌SĄ─ļŖÖC(j©®)Ż¼ļŖÖC(j©®)║¾Č╦╝ėŠÄ┤aŲ„Ż¼╦┼Ę■ļŖÖC(j©®)Č╝╩Ū▀@śėū÷Ą─Ż¼│²ĘŪ─Ń╩Ū╠ž╩Ō╩╣ė├╗“╩ŪŚl╝■Ž▐ųŲ(ø](m©”i)ėąļp│÷▌S)ĪŻę╗░Ń╩Ū╝ė╣ż2500ŠĆĄ─Š═┐╔ęįŻ¼ŠĆöĄ(sh©┤)╠½Ė▀ę▓╩Ū└╦┘M(f©©i)ĪŻ
┴Ē═ŌŠÄ┤aŲ„Ą─Ęų▒µ┬╩┼c─ŃĄ─▓Į▀M(j©¼n)ļŖÖC(j©®)Ą─Ęų▒µ┬╩┤¾ų┬ŽÓ═¼Š═║├ĪŻ╚ń╣¹“ī(q©▒)äė(d©░ng)Ų„╔Ž╝Ü(x©¼)Ęų║▄Ė▀Ż¼Č°ėųų╗ŽļÖz£y(c©©)╩Ū▓╗╩ŪüG▓Į┴╦Ż¼ŠÄ┤aŲ„Ą─Ęų▒µ┬╩ų╗ę¬┼c╝Ü(x©¼)ĘųŪ░Ą─Ęų▒µ┬╩ę╗ų┬╗“┬įĖ▀Š═┐╔ęį┴╦ĪŻ

▓Į▀M(j©¼n)ļŖÖC(j©®)╝ėŠÄ┤aŲ„Ą─ęŌ┴x
▓Į▀M(j©¼n)ļŖÖC(j©®)ļm╚╗╩Ū┐╔ęįŠ½┤_┐žųŲĄ─Ų„╝■Ż¼Ą½╩Ū╩Ūķ_(k©Īi)Łh(hu©ón)Ą─Ż¼ąĶę¬╝ėčbŠÄ┤aŲ„ęįīŹ(sh©¬)¼F(xi©żn)ķ]Łh(hu©ón)Ę┤ü┐žųŲ;▓ó┐╔£y(c©©)Ą├▓Į▀M(j©¼n)ļŖÖC(j©®)╩¦▓Į║═ą²▐D(zhu©Żn)╗“ęŲäė(d©░ng)╦┘Č╚Ż¼ęįė├ė┌äė(d©░ng)æB(t©żi)╦┘Č╚┐žųŲĪŻī”(du©¼)ė┌▀@ĘNšf(shu©Ł)Ę©Ż¼ąĪŠÄėX(ju©”)Ą├Ą┌ę╗³c(di©Żn)ķ_(k©Īi)Łh(hu©ón)┐žųŲąĶꬊÄ┤aŲ„īŹ(sh©¬)¼F(xi©żn)ķ]Łh(hu©ón)Ę┤ü▀Ć╦Ń╩Ū┐╔ęį└ĒĮŌŻ¼ę“?y©żn)ķąĪŠÄūį╝║į┌╩╣ė├ųąŻ¼┼╝Ā¢ę▓Ģ?hu©¼)ę“?y©żn)ķ▓Į▀M(j©¼n)ļŖÖC(j©®)Ą─ŠĆ▀BĮė▓╗║├Ż¼Č°ī¦(d©Żo)ų┬▓Į▀M(j©¼n)ļŖÖC(j©®)▓ó╬┤─▄š²│Ż╣żū„ĪŻī”(du©¼)ė┌Ą┌Č■³c(di©Żn)▓Į▀M(j©¼n)ļŖÖC(j©®)Ą─╦┘Č╚┐žųŲŠ═ėX(ju©”)Ą├▓╗╩Ū║▄ėą▒žę¬Ż¼ę“?y©żn)ķ═©▀^(gu©░)┐žųŲ▓Į▀M(j©¼n)ļŖÖC(j©®)Ą─├}ø_Ņl┬╩Š═ęčĮø(j©®ng)─▄ē“?q©▒)Ź¼F(xi©żn)š{(di©żo)╦┘┴╦Ż¼īŹ(sh©¬)į┌▓╗ėX(ju©”)Ą├ėą▒žę¬į┘╩╣ė├═Ō▓┐Ę┤üĪŻ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō(y©©)├µ
╦óą┬Ēō(y©©)├µ Ž┬ĄĮĒō(y©©)Ąū
Ž┬ĄĮĒō(y©©)Ąū