
平面連桿機(jī)構(gòu)概述
平面四桿機(jī)構(gòu)是由四個(gè)剛性構(gòu)件用低副鏈接組成的,各個(gè)運(yùn)動(dòng)構(gòu)件均在同一平面內(nèi)運(yùn)動(dòng)的機(jī)構(gòu)。機(jī)構(gòu)類(lèi)型有鉸鏈四桿機(jī)構(gòu)、曲柄搖桿機(jī)構(gòu)、雙搖桿機(jī)構(gòu)等。
一、平面連桿機(jī)構(gòu)概述
1.平面連桿機(jī)構(gòu): 由若干個(gè)構(gòu)件以低副(轉(zhuǎn)動(dòng)副和移動(dòng)副)連接而成,且所有構(gòu)件在相互平行平面內(nèi)運(yùn)動(dòng)的機(jī)構(gòu),也稱(chēng)平面低副機(jī)構(gòu)。
2.平面四桿機(jī)構(gòu): 最簡(jiǎn)單的平面四桿機(jī)構(gòu)是由四個(gè)構(gòu)件組成的,簡(jiǎn)稱(chēng)平面四桿機(jī)構(gòu)。
3.鉸鏈四桿機(jī)構(gòu): 構(gòu)件間用四個(gè)轉(zhuǎn)動(dòng)副相連的平面四桿機(jī)構(gòu)。
1、曲柄搖桿機(jī)構(gòu)
(1) 曲柄:1作360°周轉(zhuǎn)運(yùn)動(dòng),
(2) 搖桿:3作往復(fù)擺動(dòng),主動(dòng)件可以為曲柄,也可以為搖桿。右面機(jī)構(gòu)中搖桿的擺角為60°,作小于360的運(yùn)動(dòng)
(3) 連桿:連接曲柄與搖桿的桿件
(4)連架桿:連接機(jī)架與連桿的桿件。
曲柄搖桿機(jī)構(gòu):兩連架桿中一個(gè)為曲柄另一個(gè)為搖桿的鉸鏈四桿機(jī)構(gòu)
雙曲柄機(jī)構(gòu):兩連架桿均為曲柄的鉸鏈四桿機(jī)構(gòu)
雙搖桿機(jī)構(gòu):兩連架桿均為搖桿的鉸鏈四桿機(jī)構(gòu)
平行四邊形機(jī)構(gòu)
平行四邊形機(jī)構(gòu)是雙曲柄機(jī)構(gòu)的一個(gè)特例。組成四邊形對(duì)邊的構(gòu)件長(zhǎng)度分別相等。從動(dòng)曲柄3和主動(dòng)曲柄1的回轉(zhuǎn)方向相同,角速度時(shí)時(shí)相等
雙搖桿機(jī)構(gòu):
構(gòu)件1和3都作往復(fù)擺動(dòng),一般主動(dòng)搖桿作等速擺動(dòng),從動(dòng)搖桿作變速擺動(dòng)。
平面四桿機(jī)構(gòu)的演化形式(Ⅰ)——含一個(gè)移動(dòng)副的四桿機(jī)構(gòu)

曲柄滑塊機(jī)構(gòu)
正置曲柄滑塊機(jī)構(gòu)滑塊(slider)鉸鏈點(diǎn)的運(yùn)動(dòng)方位線通過(guò)曲柄轉(zhuǎn)動(dòng)中心,滑塊動(dòng)程(pitch)等于兩倍曲柄1的長(zhǎng)度,無(wú)急回運(yùn)動(dòng)特性。主動(dòng)件可以為曲柄,也可以為滑塊。
偏置曲柄滑塊機(jī)構(gòu)
導(dǎo)桿機(jī)構(gòu)
轉(zhuǎn)動(dòng)導(dǎo)桿機(jī)構(gòu)
擺動(dòng)導(dǎo)桿機(jī)構(gòu)
曲柄1作360°周轉(zhuǎn)運(yùn)動(dòng),擺動(dòng)導(dǎo)桿3作往復(fù)擺動(dòng),且有較大的急回運(yùn)動(dòng)特性 
曲柄搖塊機(jī)構(gòu)
移動(dòng)導(dǎo)桿機(jī)構(gòu)
構(gòu)件2作往復(fù)擺動(dòng),構(gòu)件4在滑塊中作往復(fù)移動(dòng)。
2 平面連桿機(jī)構(gòu)的工作特性
1、轉(zhuǎn)動(dòng)副為整轉(zhuǎn)副的充分必要條件
急回運(yùn)動(dòng)和行程速比系數(shù)
原動(dòng)曲柄轉(zhuǎn)動(dòng)一周過(guò)程中,有兩次與連桿共線,即重疊共線和拉直共線,搖桿兩個(gè)極限位置分別為C1D和C2D。
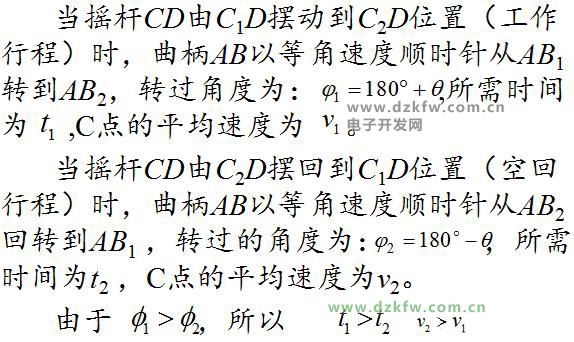
曲柄AB以等角速度ω順時(shí)針轉(zhuǎn)過(guò)α1角由位置AB1轉(zhuǎn)到位置AB2,搖桿從C1D擺到C2D,擺角為φ,所需時(shí)間為t1,C點(diǎn)平均速度為V1。當(dāng)曲柄繼續(xù)轉(zhuǎn)過(guò)角α2,搖桿從C2D返回到C1D, 所需時(shí)間為t2,C點(diǎn)平均速度為V2。
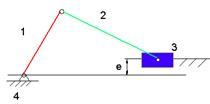
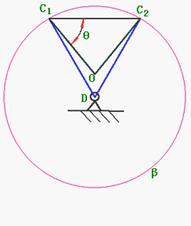
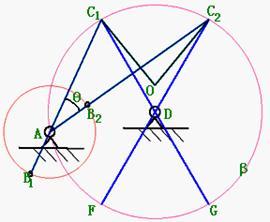
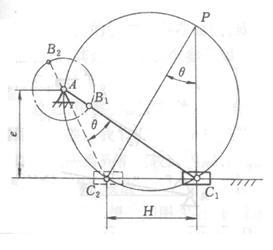
因?yàn)棣?>α2,t1>t2,所以v1 行程速比系數(shù) 在不計(jì)運(yùn)動(dòng)副中摩擦力、構(gòu)件質(zhì)量和慣性力的情況下,機(jī)構(gòu)從動(dòng)件受力方向Fc和受力點(diǎn)速度方向Vc所夾的銳角α,稱(chēng)為機(jī)構(gòu)在此位置的壓力角。 壓力角α的余角稱(chēng)為傳動(dòng)角γ,即γ+α=90º 在連桿機(jī)構(gòu)中,為了度量方便,常用傳動(dòng)角γ來(lái)衡量機(jī)構(gòu)的傳力性能。傳動(dòng)角是指連桿BC與從動(dòng)件CD之間所夾的銳角。γ與α互余。 大多數(shù)機(jī)構(gòu)在運(yùn)動(dòng)過(guò)程中,傳動(dòng)角是變化的。為保證機(jī)構(gòu)具有良好的傳動(dòng)性能,一般規(guī)定機(jī)構(gòu)的最小傳動(dòng)角γmin≥40º,在傳遞較大力矩時(shí),應(yīng)使γmin≥50º。 死點(diǎn):搖桿CD為主動(dòng)件。當(dāng)機(jī)構(gòu)處于連桿與從動(dòng)曲柄共線的兩個(gè)位置時(shí),出現(xiàn)了傳動(dòng)角γ=0º,壓力角α=90º的情況。主動(dòng)件CD通過(guò)連桿作用于從動(dòng)件AB的力恰好通過(guò)其回轉(zhuǎn)中心,不能使AB桿轉(zhuǎn)動(dòng),機(jī)構(gòu)此位置稱(chēng)為死點(diǎn) 在機(jī)輪放下時(shí),連桿BC桿與從動(dòng)桿CD桿成一直線,機(jī)構(gòu)處于死點(diǎn)位置,使降落更加安全可靠。 工件夾緊機(jī)構(gòu) 3 連桿機(jī)構(gòu)設(shè)計(jì) 要求:設(shè)計(jì)曲柄搖桿機(jī)構(gòu) 解:1、計(jì)算極位夾角θ θ=180(K-1)/ (K+1) 2、任取一點(diǎn)D為搖桿固定鉸鏈中心,作等腰三角形C1C2D,兩腰長(zhǎng)度等于CD,∠C1DC2=φ 4、連接并延長(zhǎng)C1D,交圓β于G點(diǎn),連接并延長(zhǎng)C2D,交圓β于F點(diǎn)。 圓弧C1F和GC2上任意一點(diǎn)A到C1和C2的連線的夾角∠C1AC2都等于極位夾角θ。曲柄軸心A點(diǎn)可在這兩段圓弧上選取 注意:曲柄軸心A不能在FG圓弧上選取,否則機(jī)構(gòu)不滿運(yùn)動(dòng)連續(xù)性要求。 在C1F和GC2兩段圓弧上選取A點(diǎn)時(shí),當(dāng)A點(diǎn)越靠近F(或G)點(diǎn)時(shí),機(jī)構(gòu)最小傳動(dòng)角將隨之減小。 AC1=b-a AC2=b+a 所以:a=(AC2-AC1)/2 b=(AC1+AC2)/2 2) 對(duì)于擺動(dòng)導(dǎo)桿機(jī)構(gòu),由于其導(dǎo)桿的擺角φ 剛好等于其極位夾角θ,因此,只要給定曲柄長(zhǎng)度LAB (或給定機(jī)架長(zhǎng)度LAC)和行程速比系數(shù)K就可以由右圖求得機(jī)構(gòu). (1)運(yùn)動(dòng)副都是低副,壽命長(zhǎng),傳遞動(dòng)力大。 (2)何形狀簡(jiǎn)單,易于加工,成本低。 (3)在主動(dòng)件等速連續(xù)運(yùn)動(dòng)的條件下,當(dāng)各構(gòu)件的相對(duì)長(zhǎng)度不同時(shí),從動(dòng)件可滿足多種運(yùn)動(dòng)規(guī)律的要求。 (4)連桿上各點(diǎn)軌跡形狀各異,可利用這些曲線來(lái)滿足不同的軌跡要求。 (5)能夠?qū)崿F(xiàn)多種運(yùn)動(dòng)形式的轉(zhuǎn)換,也可以實(shí)現(xiàn)各種預(yù)定的運(yùn)動(dòng)規(guī)律和復(fù)雜的運(yùn)動(dòng)軌跡,容易滿足生產(chǎn)中各種動(dòng)作要求; (6)構(gòu)件間接觸面上的比壓小、易潤(rùn)滑、磨損輕、適用于傳遞較大載荷的場(chǎng)合; (7)機(jī)構(gòu)中運(yùn)動(dòng)副的元素形狀簡(jiǎn)單、易于加工制造和保證精度。 5.平面連桿機(jī)構(gòu)的缺點(diǎn): (1)誤差較大,降低機(jī)械效率。 (2)不容易實(shí)現(xiàn)精確復(fù)雜的運(yùn)動(dòng)規(guī)律。 (3)不宜用于高速傳動(dòng)。 二、鉸鏈四桿機(jī)構(gòu) 1.鉸鏈四桿機(jī)構(gòu)的組成 (1)機(jī)架——固定件,如下圖所示構(gòu)件4; (2)連架桿——與機(jī)架用轉(zhuǎn)動(dòng)副相連接的構(gòu)件,如下圖所示構(gòu)件1和構(gòu)件3; (3)連桿——不與機(jī)架直接相連的構(gòu)件,如下圖所示構(gòu)件2。 2.鉸鏈四桿機(jī)構(gòu)的基本形式 根據(jù)連架桿運(yùn)動(dòng)形式的不同,相對(duì)機(jī)架能做整周轉(zhuǎn)動(dòng)的稱(chēng)為曲柄,只能在一定角度范圍內(nèi)往復(fù)擺動(dòng)的稱(chēng)為搖桿。這樣,鉸鏈四桿機(jī)構(gòu)可分為三種基本形式: (1)曲柄搖桿機(jī)構(gòu):兩連架桿中,一個(gè)為曲柄,而另一個(gè)為搖桿。 (2)雙曲柄機(jī)構(gòu) 兩連架桿均為曲柄。 (3)雙搖桿機(jī)構(gòu) 兩連架桿均為搖桿。 3.曲柄搖桿機(jī)構(gòu) 在鉸鏈四桿機(jī)構(gòu)的兩連架桿中,若一個(gè)為曲柄,另一個(gè)為搖桿,則此四桿機(jī)構(gòu)稱(chēng)為曲柄搖桿機(jī)構(gòu)。通常曲柄等速轉(zhuǎn)動(dòng),搖桿作變速往復(fù)擺動(dòng)。 4.雙曲柄機(jī)構(gòu) 在鉸鏈四桿機(jī)構(gòu)中,若兩連架桿均為曲柄,則此四桿機(jī)構(gòu)稱(chēng)為雙曲柄機(jī)構(gòu)。 5.雙搖桿機(jī)構(gòu) 在鉸鏈四桿機(jī)構(gòu)中,若兩連架桿均為搖桿,則此四桿機(jī)構(gòu)稱(chēng)為雙搖桿機(jī)構(gòu)。 6.曲柄存在的條件: (1)連架桿和機(jī)架中必有一桿是最短桿。 (2)最短桿與最長(zhǎng)桿長(zhǎng)度之和小于或等于其余兩桿長(zhǎng)度之和。 上述兩個(gè)條件必須同時(shí)滿足,否則機(jī)構(gòu)不存在曲柄。當(dāng)滿足桿長(zhǎng)條件時(shí),說(shuō)明存在整轉(zhuǎn)副,當(dāng)選擇不同的構(gòu)件作為機(jī)架時(shí),可得不同的機(jī)構(gòu)。如曲柄搖桿 、雙曲柄、 雙搖桿機(jī)構(gòu)。 (1)連架桿是最短桿 為曲柄搖桿機(jī)構(gòu); (2)機(jī)架是最短桿 為雙曲柄機(jī)構(gòu); (3)若最短桿是連桿,此機(jī)構(gòu)為雙搖桿機(jī)構(gòu)。若滿足最短桿與最長(zhǎng)桿長(zhǎng)度之和大于其余兩桿長(zhǎng)度之和時(shí),為雙搖桿機(jī)構(gòu)。 三、含有一個(gè)移動(dòng)副的平面四桿機(jī)構(gòu) 1.曲柄滑塊機(jī)構(gòu) 曲柄滑塊機(jī)構(gòu)是用移動(dòng)副取代曲柄搖桿機(jī)構(gòu)中的轉(zhuǎn)動(dòng)副而演化得到的。 曲柄滑塊機(jī)構(gòu)用于轉(zhuǎn)動(dòng)與往復(fù)移動(dòng)之間的運(yùn)動(dòng)轉(zhuǎn)換,廣泛應(yīng)用于活塞式內(nèi)燃機(jī)、空氣壓縮機(jī)、沖床和自動(dòng)送料機(jī)等機(jī)械設(shè)備中。 2.導(dǎo)桿機(jī)構(gòu) 導(dǎo)桿機(jī)構(gòu)可看成是通過(guò)改變曲柄滑塊機(jī)構(gòu)中的固定構(gòu)件演化而來(lái)的。 3.曲柄擺動(dòng)導(dǎo)桿機(jī)構(gòu) 4.移動(dòng)導(dǎo)桿機(jī)構(gòu) 也稱(chēng)為定塊機(jī)構(gòu)。這種機(jī)構(gòu)常用于抽水唧筒和抽油泵中。 5.擺動(dòng)導(dǎo)桿機(jī)構(gòu) 四、平面四桿機(jī)構(gòu)的工作特性 1.急回特性 搖桿CD處此兩極限位置時(shí)曲柄所在直線之間的銳角θ稱(chēng)為極位夾角,機(jī)構(gòu)中輸出件在兩極限位置間的移動(dòng)距離或擺動(dòng)角度φ稱(chēng)為行程。 曲柄滑塊機(jī)構(gòu),當(dāng)偏心距e=0時(shí),θ=0,K=1,機(jī)構(gòu)無(wú)急回特性;當(dāng)偏心距e不等于0時(shí),θ不等于0,則K>1,機(jī)構(gòu)有急回特性。 3.壓力角和傳動(dòng)角 如下圖所示的曲柄搖桿機(jī)構(gòu)中,如不考慮構(gòu)件的重量和摩擦力,可將F分解可得推動(dòng)搖桿的有效分力Ft=Fcosα,只能產(chǎn)生摩擦阻力的有害分力Fr=Fsinα。 其中,α稱(chēng)為壓力角,即為作用在從動(dòng)件上的驅(qū)動(dòng)力與該力作用點(diǎn)的絕對(duì)速度方向之間所加銳角稱(chēng)為壓力角,通常把壓力角座位判斷一連桿機(jī)構(gòu)是否具有良好的傳力性能的標(biāo)志。 常以連桿與搖桿所夾銳角γ來(lái)衡量機(jī)構(gòu)的傳力性能。顯而易見(jiàn),γ即壓力角的余角,稱(chēng)為傳動(dòng)角。因?yàn)棣?90°−α,故γ愈大,對(duì)機(jī)構(gòu)傳動(dòng)愈有利。 4.死點(diǎn) 如下圖所示的曲柄搖桿機(jī)構(gòu)中,當(dāng)搖桿CD為主動(dòng)件、曲柄AB為從動(dòng)件時(shí),當(dāng)搖桿處在兩個(gè)極限位置時(shí),連桿BC與曲柄AB共線。若不計(jì)各構(gòu)件質(zhì)量,則這時(shí)連桿加給曲柄的力將通過(guò)鉸鏈A的中心,這時(shí)連桿BC無(wú)論給從動(dòng)件曲柄AB的力多么大都不能推動(dòng)曲柄運(yùn)動(dòng),機(jī)構(gòu)所處的這種位置稱(chēng)為死點(diǎn)位置。 在實(shí)際應(yīng)用中也有利用死點(diǎn)位置的性質(zhì)來(lái)進(jìn)行工作的。如下圖所示快速夾具,機(jī)構(gòu)處于死點(diǎn)位置,在去除外力F后仍可加緊工件而不自動(dòng)脫落。只有向上扳動(dòng)手柄3方可松開(kāi)夾具。 五、平面四桿機(jī)構(gòu)的設(shè)計(jì) 1.四桿機(jī)構(gòu)設(shè)計(jì)條件 (1)給定位置或運(yùn)動(dòng)規(guī)律,如連桿位置、連架桿對(duì)應(yīng)位置或行程速度變化系數(shù)等。 (2)給定運(yùn)動(dòng)軌跡,如要求起重機(jī)中吊鉤的軌跡為一直線;攪面機(jī)中攪拌桿端能按預(yù)定軌跡運(yùn)動(dòng)等,這些都是連桿上的點(diǎn)的軌跡。為了使機(jī)構(gòu)設(shè)計(jì)的合理、可靠,還應(yīng)考慮幾何條件和傳力性能要求等。 2.四桿機(jī)構(gòu)的設(shè)計(jì)方法 (1)已知連桿的兩個(gè)位置、及其長(zhǎng)度,設(shè)計(jì)鉸鏈四桿機(jī)構(gòu)。 (2)按給定連桿三個(gè)位置設(shè)計(jì)四桿機(jī)構(gòu) (3)按給定的行程速度變化系數(shù)設(shè)計(jì)四桿機(jī)構(gòu) 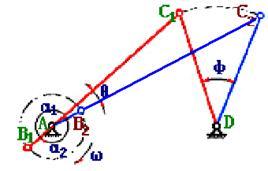
 壓力角與傳動(dòng)角
壓力角與傳動(dòng)角

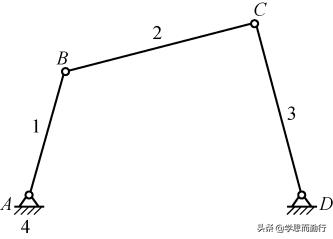 鉸鏈四桿機(jī)構(gòu)
鉸鏈四桿機(jī)構(gòu)

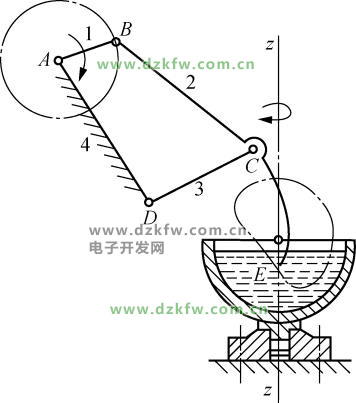 攪拌機(jī)
攪拌機(jī)
 平行四邊形機(jī)構(gòu)和反平行四邊形機(jī)構(gòu)
平行四邊形機(jī)構(gòu)和反平行四邊形機(jī)構(gòu)
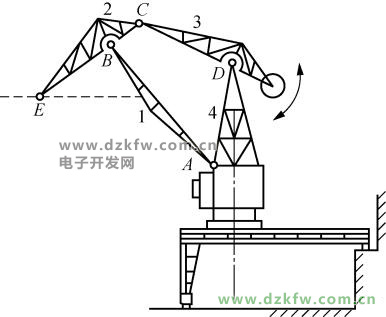 鶴式起重機(jī)
鶴式起重機(jī)
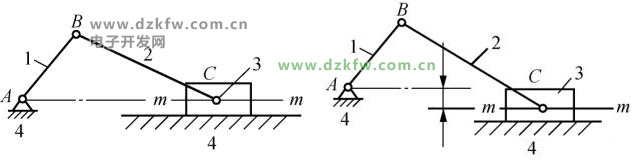 曲柄滑塊機(jī)構(gòu):(左)對(duì)心曲柄滑塊機(jī)構(gòu);(右)偏置曲柄滑塊機(jī)構(gòu)
曲柄滑塊機(jī)構(gòu):(左)對(duì)心曲柄滑塊機(jī)構(gòu);(右)偏置曲柄滑塊機(jī)構(gòu)
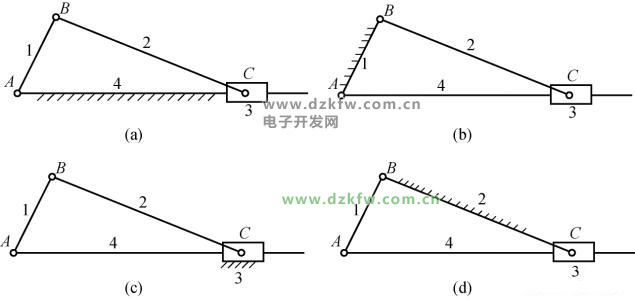 (a)對(duì)心曲柄滑塊機(jī)構(gòu);(b)曲柄轉(zhuǎn)動(dòng)導(dǎo)桿機(jī)構(gòu);(c)移動(dòng)導(dǎo)桿機(jī)構(gòu);(d)擺動(dòng)導(dǎo)桿機(jī)構(gòu)
(a)對(duì)心曲柄滑塊機(jī)構(gòu);(b)曲柄轉(zhuǎn)動(dòng)導(dǎo)桿機(jī)構(gòu);(c)移動(dòng)導(dǎo)桿機(jī)構(gòu);(d)擺動(dòng)導(dǎo)桿機(jī)構(gòu)
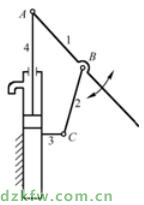
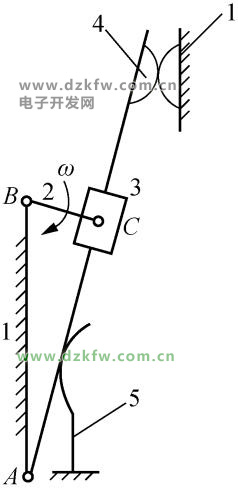 曲柄擺動(dòng)導(dǎo)桿機(jī)構(gòu)在電器開(kāi)關(guān)中的應(yīng)用
曲柄擺動(dòng)導(dǎo)桿機(jī)構(gòu)在電器開(kāi)關(guān)中的應(yīng)用
 抽水唧筒
抽水唧筒
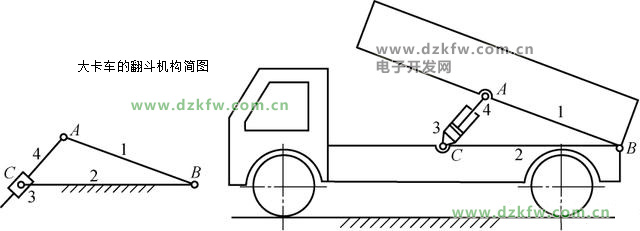 汽車(chē)自動(dòng)卸料機(jī)構(gòu)
汽車(chē)自動(dòng)卸料機(jī)構(gòu)
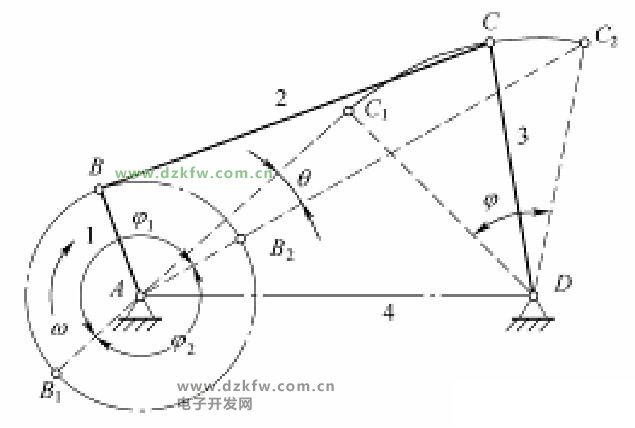
 綜上所述,在輸入件曲柄作等速轉(zhuǎn)動(dòng)時(shí),作往復(fù)擺動(dòng)的輸出件搖桿在空載行程中的平均速度大于工作行程中的平均速度,這一性質(zhì)稱(chēng)為連桿機(jī)構(gòu)的急回特性。通常用行程速度變化系數(shù)K來(lái)表示這種特性:
綜上所述,在輸入件曲柄作等速轉(zhuǎn)動(dòng)時(shí),作往復(fù)擺動(dòng)的輸出件搖桿在空載行程中的平均速度大于工作行程中的平均速度,這一性質(zhì)稱(chēng)為連桿機(jī)構(gòu)的急回特性。通常用行程速度變化系數(shù)K來(lái)表示這種特性: 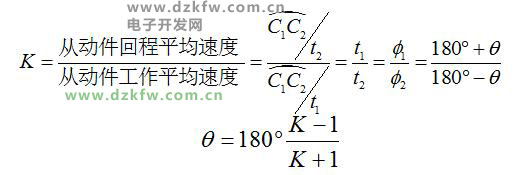 機(jī)構(gòu)的急回速度取決于夾角θ的大小。θ越大,K值越大,機(jī)構(gòu)的急回程度也越高,但從另一方面看,機(jī)構(gòu)運(yùn)動(dòng)的平穩(wěn)性就越差。 2.曲柄滑塊機(jī)構(gòu)急回特性
機(jī)構(gòu)的急回速度取決于夾角θ的大小。θ越大,K值越大,機(jī)構(gòu)的急回程度也越高,但從另一方面看,機(jī)構(gòu)運(yùn)動(dòng)的平穩(wěn)性就越差。 2.曲柄滑塊機(jī)構(gòu)急回特性
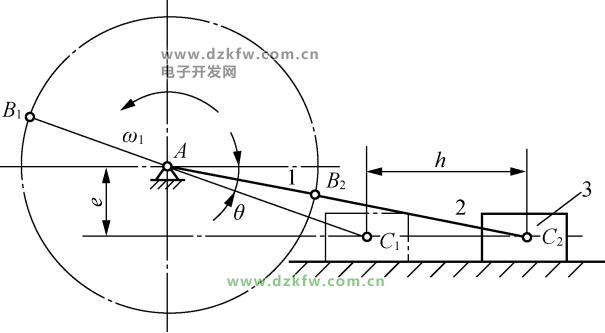 偏置曲柄滑塊機(jī)構(gòu)
偏置曲柄滑塊機(jī)構(gòu)
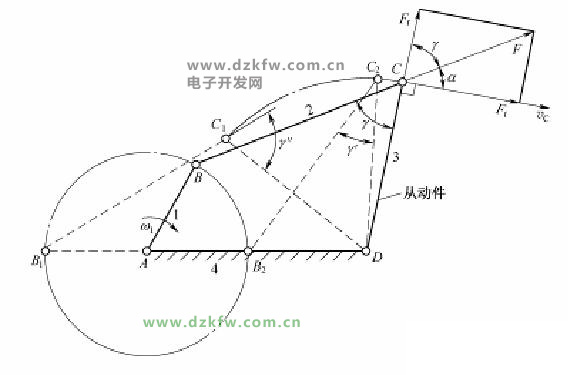 壓力角和傳動(dòng)角
壓力角和傳動(dòng)角
 死點(diǎn)位置
死點(diǎn)位置
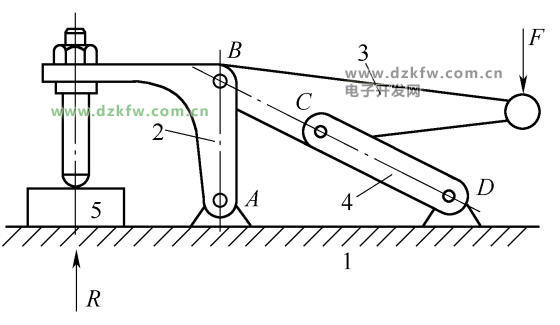 死點(diǎn)的應(yīng)用
死點(diǎn)的應(yīng)用
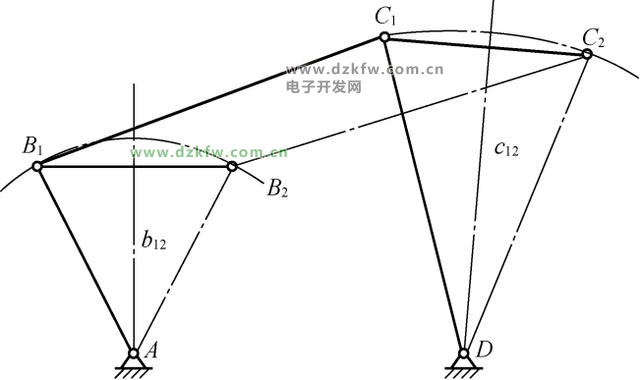 已知連桿兩位置設(shè)計(jì)鉸鏈四桿機(jī)構(gòu)
已知連桿兩位置設(shè)計(jì)鉸鏈四桿機(jī)構(gòu)
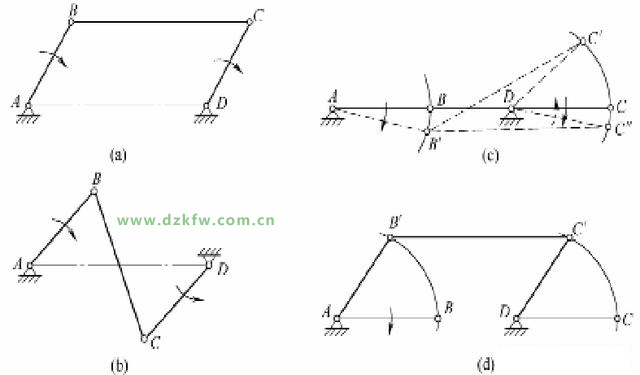
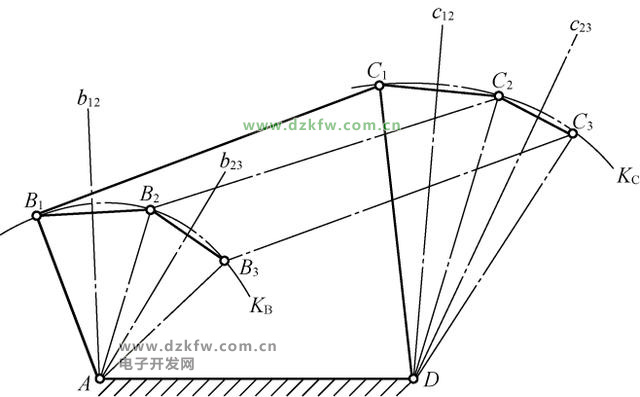 按給定連桿三個(gè)位置設(shè)計(jì)四桿機(jī)構(gòu)
按給定連桿三個(gè)位置設(shè)計(jì)四桿機(jī)構(gòu)
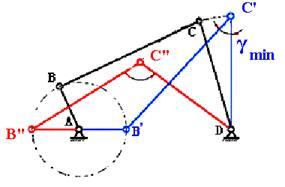
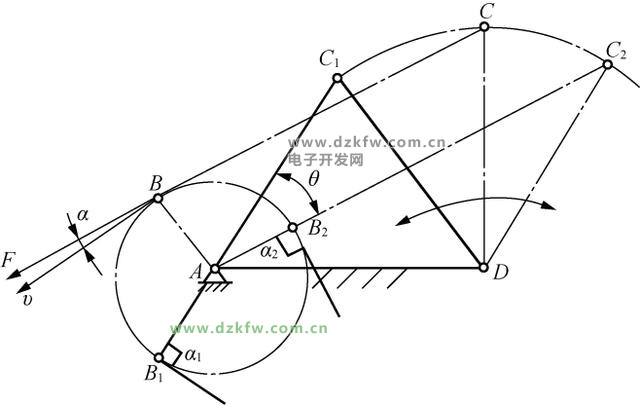
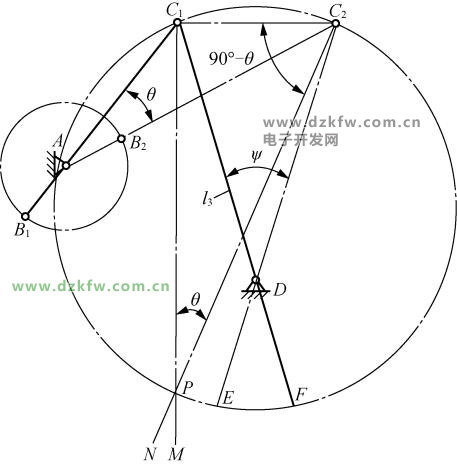 按給定的行程速度變化系數(shù)設(shè)計(jì)四桿機(jī)構(gòu)
按給定的行程速度變化系數(shù)設(shè)計(jì)四桿機(jī)構(gòu)
 返回頂部
返回頂部 刷新頁(yè)面
刷新頁(yè)面 下到頁(yè)底
下到頁(yè)底