
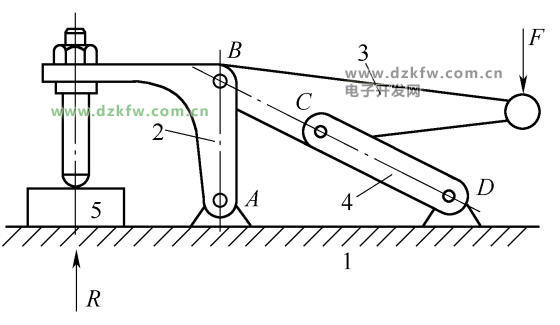
ĪĪĪĪŲĮ├µ▀BŚUÖCśŗĖ┼╩÷
ĪĪĪĪŲĮ├µ╦─ŚUÖCśŗ╩Ūė╔╦─éĆäéąįśŗ╝■ė├Ą═Ė▒µ£ĮėĮM│╔Ą─Ż¼Ė„éĆ▀\äėśŗ╝■Š∙į┌═¼ę╗ŲĮ├µā╚▀\äėĄ─ÖCśŗĪŻÖCśŗŅÉą═ėąŃqµ£╦─ŚUÖCśŗĪóŪ·▒·ōuŚUÖCśŗĪóļpōuŚUÖCśŗĄ╚ĪŻ
ĪĪĪĪę╗ĪóŲĮ├µ▀BŚUÖCśŗĖ┼╩÷
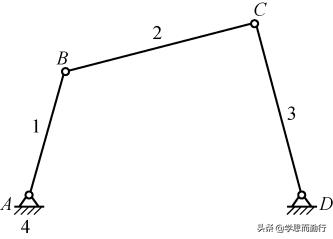
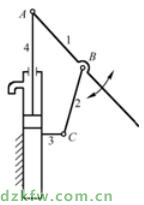
ĪĪĪĪ1.ŲĮ├µ▀BŚUÖCśŗŻ║ ė╔╚¶Ė╔éĆśŗ╝■ęįĄ═Ė▒(▐DäėĖ▒║═ęŲäėĖ▒)▀BĮėČ°│╔Ż¼Ūę╦∙ėąśŗ╝■į┌ŽÓ╗źŲĮąąŲĮ├µā╚▀\äėĄ─ÖCśŗŻ¼ę▓ĘQŲĮ├µĄ═Ė▒ÖCśŗĪŻ
ĪĪĪĪ2.ŲĮ├µ╦─ŚUÖCśŗŻ║ ūŅ║åå╬Ą─ŲĮ├µ╦─ŚUÖCśŗ╩Ūė╔╦─éĆśŗ╝■ĮM│╔Ą─Ż¼║åĘQŲĮ├µ╦─ŚUÖCśŗĪŻ
ĪĪĪĪ3.Ńqµ£╦─ŚUÖCśŗŻ║ śŗ╝■ķgė├╦─éĆ▐DäėĖ▒ŽÓ▀BĄ─ŲĮ├µ╦─ŚUÖCśŗĪŻ
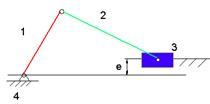
ĪĪĪĪ1ĪóŪ·▒·ōuŚUÖCśŗ
ĪĪĪĪ(1) Ū·▒·Ż║1ū„360ĪŃų▄▐D▀\äėŻ¼
ĪĪĪĪ(2) ōuŚUŻ║3ū„═∙Å═ö[äėŻ¼ų„äė╝■┐╔ęį×ķŪ·▒·Ż¼ę▓┐╔ęį×ķōuŚUĪŻėę├µÖCśŗųąōuŚUĄ─ö[ĮŪ×ķ60ĪŃŻ¼ū„ąĪė┌360Ą─▀\äė
ĪĪĪĪ(3) ▀BŚUŻ║▀BĮėŪ·▒·┼cōuŚUĄ─ŚU╝■
ĪĪĪĪ(4)▀B╝▄ŚUŻ║▀BĮėÖC╝▄┼c▀BŚUĄ─ŚU╝■ĪŻ
ĪĪĪĪŪ·▒·ōuŚUÖCśŗŻ║ā╔▀B╝▄ŚUųąę╗éĆ×ķŪ·▒·┴Ēę╗éĆ×ķōuŚUĄ─Ńqµ£╦─ŚUÖCśŗ
ĪĪĪĪļpŪ·▒·ÖCśŗŻ║ā╔▀B╝▄ŚUŠ∙×ķŪ·▒·Ą─Ńqµ£╦─ŚUÖCśŗ
ĪĪĪĪļpōuŚUÖCśŗŻ║ā╔▀B╝▄ŚUŠ∙×ķōuŚUĄ─Ńqµ£╦─ŚUÖCśŗ
ĪĪĪĪŲĮąą╦─▀ģą╬ÖCśŗ
ĪĪĪĪŲĮąą╦─▀ģą╬ÖCśŗ╩ŪļpŪ·▒·ÖCśŗĄ─ę╗éĆ╠ž└²ĪŻĮM│╔╦─▀ģą╬ī”▀ģĄ─śŗ╝■ķLČ╚ĘųäeŽÓĄ╚ĪŻÅ─äėŪ·▒·3║═ų„äėŪ·▒·1Ą─╗ž▐DĘĮŽ“ŽÓ═¼Ż¼ĮŪ╦┘Č╚ĢrĢrŽÓĄ╚
ĪĪĪĪļpōuŚUÖCśŗŻ║
ĪĪĪĪśŗ╝■1║═3Č╝ū„═∙Å═ö[äėŻ¼ę╗░Ńų„äėōuŚUū„Ą╚╦┘ö[äėŻ¼Å─äėōuŚUū„ūā╦┘ö[äėĪŻ
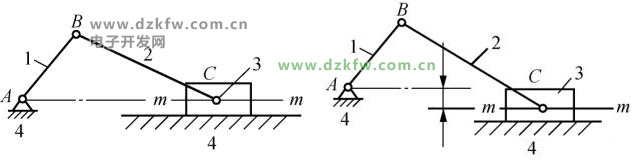
ĪĪĪĪŲĮ├µ╦─ŚUÖCśŗĄ─č▌╗»ą╬╩Į(ó±)Ī¬Ī¬║¼ę╗éĆęŲäėĖ▒Ą─╦─ŚUÖCśŗ

ĪĪĪĪŪ·▒·╗¼ēKÖCśŗ
ĪĪĪĪš²ų├Ū·▒·╗¼ēKÖCśŗĪĪĪĪ╗¼ēK(slider)Ńqµ£³cĄ─▀\äėĘĮ╬╗ŠĆ═©▀^Ū·▒·▐Däėųąą─Ż¼╗¼ēKäė│╠(pitch)Ą╚ė┌ā╔▒ČŪ·▒·1Ą─ķLČ╚Ż¼¤o╝▒╗ž▀\äė╠žąįĪŻų„äė╝■┐╔ęį×ķŪ·▒·Ż¼ę▓┐╔ęį×ķ╗¼ēKĪŻ
ĪĪĪĪŲ½ų├Ū·▒·╗¼ēKÖCśŗ
ĪĪĪĪī¦ŚUÖCśŗ
ĪĪĪĪ▐Däėī¦ŚUÖCśŗ
ĪĪĪĪö[äėī¦ŚUÖCśŗ
ĪĪĪĪŪ·▒·1ū„360ĪŃų▄▐D▀\äėŻ¼ö[äėī¦ŚU3ū„═∙Å═ö[äėŻ¼Ūęėą▌^┤¾Ą─╝▒╗ž▀\äė╠žąį  ĪĪĪĪ
ĪĪĪĪ
Ū·▒·ōuēKÖCśŗ
ĪĪĪĪęŲäėī¦ŚUÖCśŗ
ĪĪĪĪśŗ╝■2ū„═∙Å═ö[äėŻ¼śŗ╝■4į┌╗¼ēKųąū„═∙Å═ęŲäėĪŻ
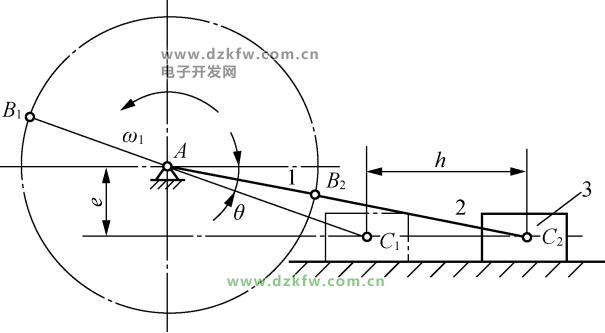
ĪĪĪĪ2 ŲĮ├µ▀BŚUÖCśŗĄ─╣żū„╠žąį
ĪĪĪĪ1Īó▐DäėĖ▒×ķš¹▐DĖ▒Ą─│õĘų▒žę¬Śl╝■
ĪĪĪĪ╝▒╗ž▀\äė║═ąą│╠╦┘▒╚ŽĄöĄ
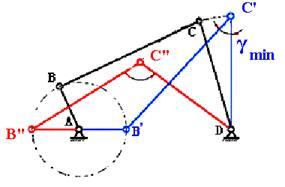
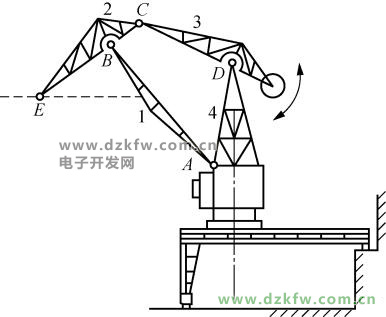
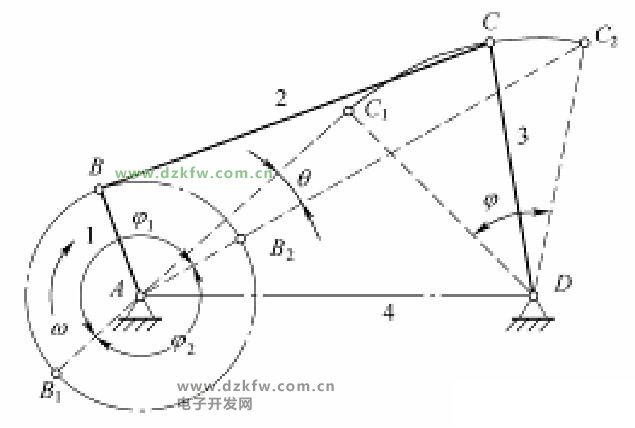
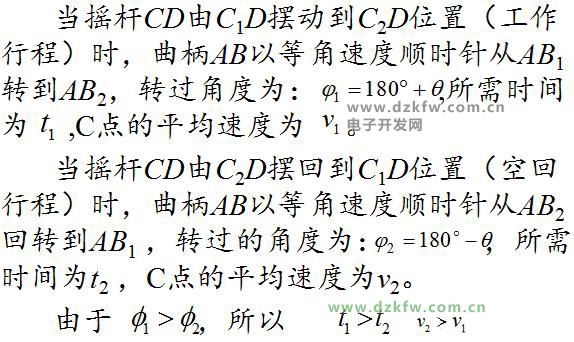
ĪĪĪĪįŁäėŪ·▒·▐Däėę╗ų▄▀^│╠ųąŻ¼ėąā╔┤╬┼c▀BŚU╣▓ŠĆŻ¼╝┤ųž»B╣▓ŠĆ║═└Łų▒╣▓ŠĆŻ¼ōuŚUā╔éĆśOŽ▐╬╗ų├Ęųäe×ķC1D║═C2DĪŻ
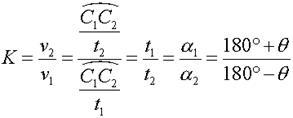
ĪĪĪĪŪ·▒·ABęįĄ╚ĮŪ╦┘Č╚”žĒśĢrßś▐D▀^”┴1ĮŪė╔╬╗ų├AB1▐DĄĮ╬╗ų├AB2Ż¼ōuŚUÅ─C1Dö[ĄĮC2D,ö[ĮŪ×ķ”šŻ¼╦∙ąĶĢrķg×ķt1Ż¼C³cŲĮŠ∙╦┘Č╚×ķV1ĪŻ«öŪ·▒·└^└m▐D▀^ĮŪ”┴2Ż¼ōuŚUÅ─C2DĘĄ╗žĄĮC1D, ╦∙ąĶĢrķg×ķt2Ż¼C³cŲĮŠ∙╦┘Č╚×ķV2ĪŻ
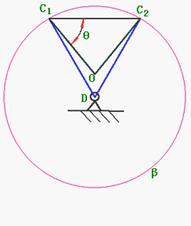
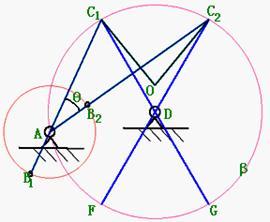
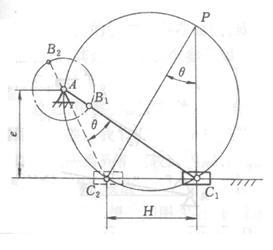
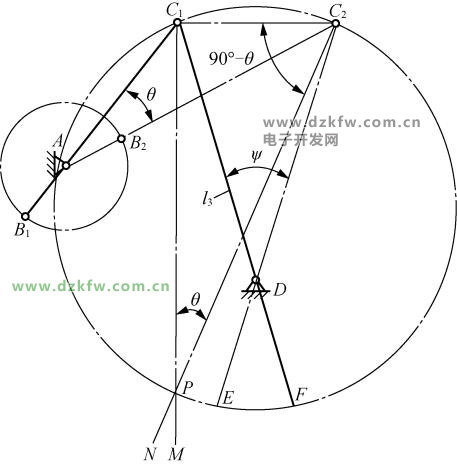
ĪĪĪĪę“×ķ”┴1>”┴2Ż¼t1>t2Ż¼╦∙ęįv1 ĪĪĪĪąą│╠╦┘▒╚ŽĄöĄ ĪĪĪĪį┌▓╗ėŗ▀\äėĖ▒ųą─”▓┴┴”Īóśŗ╝■┘|┴┐║═æTąį┴”Ą─ŪķørŽ┬Ż¼ÖCśŗÅ─äė╝■╩▄┴”ĘĮŽ“Fc║═╩▄┴”³c╦┘Č╚ĘĮŽ“Vc╦∙ŖAĄ─õJĮŪ”┴Ż¼ĘQ×ķÖCśŗį┌┤╦╬╗ų├Ą─ē║┴”ĮŪĪŻ ĪĪĪĪē║┴”ĮŪ”┴Ą─ėÓĮŪĘQ×ķé„äėĮŪ”├Ż¼╝┤”├+”┴=90º ĪĪĪĪį┌▀BŚUÖCśŗųąŻ¼×ķ┴╦Č╚┴┐ĘĮ▒ŃŻ¼│Żė├é„äėĮŪ”├üĒ║Ō┴┐ÖCśŗĄ─é„┴”ąį─▄ĪŻé„äėĮŪ╩ŪųĖ▀BŚUBC┼cÅ─äė╝■CDų«ķg╦∙ŖAĄ─õJĮŪĪŻ”├┼c”┴╗źėÓĪŻ ĪĪĪĪ┤¾ČÓöĄÖCśŗį┌▀\äė▀^│╠ųąŻ¼é„äėĮŪ╩Ūūā╗»Ą─ĪŻ×ķ▒ŻūCÖCśŗŠ▀ėą┴╝║├Ą─é„äėąį─▄Ż¼ę╗░ŃęÄČ©ÖCśŗĄ─ūŅąĪé„äėĮŪ”├minĪ▌40ºŻ¼į┌é„▀f▌^┤¾┴”ŠžĢrŻ¼æ¬╩╣”├minĪ▌50ºĪŻ ĪĪĪĪ╦└³cŻ║ōuŚUCD×ķų„äė╝■ĪŻ«öÖCśŗ╠Äė┌▀BŚU┼cÅ─äėŪ·▒·╣▓ŠĆĄ─ā╔éĆ╬╗ų├ĢrŻ¼│÷¼F┴╦é„äėĮŪ”├=0ºŻ¼ē║┴”ĮŪ”┴=90ºĄ─ŪķørĪŻų„äė╝■CD═©▀^▀BŚUū„ė├ė┌Å─äė╝■ABĄ─┴”ŪĪ║├═©▀^Ųõ╗ž▐Dųąą─Ż¼▓╗─▄╩╣ABŚU▐DäėŻ¼ÖCśŗ┤╦╬╗ų├ĘQ×ķ╦└³c ĪĪĪĪį┌ÖC▌åĘ┼Ž┬ĢrŻ¼▀BŚUBCŚU┼cÅ─äėŚUCDŚU│╔ę╗ų▒ŠĆŻ¼ÖCśŗ╠Äė┌╦└³c╬╗ų├Ż¼╩╣ĮĄ┬õĖ³╝ė░▓╚½┐╔┐┐ĪŻ ĪĪĪĪ╣ż╝■ŖAŠoÖCśŗ ĪĪĪĪ3 ▀BŚUÖCśŗįOėŗ ĪĪĪĪę¬Ū¾Ż║įOėŗŪ·▒·ōuŚUÖCśŗ ĪĪĪĪĮŌŻ║1Īóėŗ╦ŃśO╬╗ŖAĮŪ”╚ ”╚=180(K-1)/ (K+1) ĪĪĪĪ2Īó╚╬╚Īę╗³cD×ķōuŚU╣╠Č©Ńqµ£ųąą─Ż¼ū„Ą╚č³╚²ĮŪą╬C1C2DŻ¼ā╔č³ķLČ╚Ą╚ė┌CDŻ¼ĪŽC1DC2=”š ĪĪĪĪ4Īó▀BĮė▓óčėķLC1DŻ¼Į╗łA”┬ė┌G³cŻ¼▀BĮė▓óčėķLC2DŻ¼Į╗łA”┬ė┌F³cĪŻ łA╗ĪC1F║═GC2╔Ž╚╬ęŌę╗³cAĄĮC1║═C2Ą─▀BŠĆĄ─ŖAĮŪĪŽC1AC2Č╝Ą╚ė┌śO╬╗ŖAĮŪ”╚ĪŻŪ·▒·▌Są─A³c┐╔į┌▀@ā╔Č╬łA╗Ī╔Ž▀x╚Ī ĪĪĪĪūóęŌŻ║Ū·▒·▌Są─A▓╗─▄į┌FGłA╗Ī╔Ž▀x╚ĪŻ¼Ę±ätÖCśŗ▓╗ØM▀\äė▀B└mąįę¬Ū¾ĪŻ į┌C1F║═GC2ā╔Č╬łA╗Ī╔Ž▀x╚ĪA³cĢrŻ¼«öA³cįĮ┐┐Į³F(╗“G)³cĢrŻ¼ÖCśŗūŅąĪé„äėĮŪīóļSų«£pąĪĪŻ ĪĪĪĪAC1=b-a ĪĪĪĪAC2=b+a ĪĪĪĪ╦∙ęįŻ║a=(AC2-AC1)/2 ĪĪĪĪb=(AC1+AC2)/2 ĪĪĪĪ2) ī”ė┌ö[äėī¦ŚUÖCśŗ,ė╔ė┌Ųõī¦ŚUĄ─ö[ĮŪ”š äé║├Ą╚ė┌ŲõśO╬╗ŖAĮŪ”╚,ę“┤╦,ų╗ę¬ĮoČ©Ū·▒·ķLČ╚LAB (╗“ĮoČ©ÖC╝▄ķLČ╚LAC)║═ąą│╠╦┘▒╚ŽĄöĄKŠ═┐╔ęįė╔ėęłDŪ¾Ą├ÖCśŗ. ĪĪĪĪ(1)▀\äėĖ▒Č╝╩ŪĄ═Ė▒Ż¼ē█├³ķLŻ¼é„▀fäė┴”┤¾ĪŻ ĪĪĪĪ(2)║╬ą╬ĀŅ║åå╬Ż¼ęūė┌╝ė╣żŻ¼│╔▒ŠĄ═ĪŻ ĪĪĪĪ(3)į┌ų„äė╝■Ą╚╦┘▀B└m▀\äėĄ─Śl╝■Ž┬Ż¼«öĖ„śŗ╝■Ą─ŽÓī”ķLČ╚▓╗═¼Ģr,Å─äė╝■┐╔ØMūŃČÓĘN▀\äėęÄ┬╔Ą─ę¬Ū¾ĪŻ ĪĪĪĪ(4)▀BŚU╔ŽĖ„³c▄ē█Eą╬ĀŅĖ„«ÉŻ¼┐╔└¹ė├▀@ą®Ū·ŠĆüĒØMūŃ▓╗═¼Ą─▄ē█Eę¬Ū¾ĪŻ ĪĪĪĪ(5)─▄ē“īŹ¼FČÓĘN▀\äėą╬╩ĮĄ─▐DōQŻ¼ę▓┐╔ęįīŹ¼FĖ„ĘNŅAČ©Ą─▀\äėęÄ┬╔║═Å═ļsĄ─▀\äė▄ē█EŻ¼╚▌ęūØMūŃ╔·«aųąĖ„ĘNäėū„ę¬Ū¾; ĪĪĪĪ(6)śŗ╝■ķgĮėė|├µ╔ŽĄ─▒╚ē║ąĪĪóęūØÖ╗¼Īó─źōp▌pĪó▀mė├ė┌é„▀f▌^┤¾▌d║╔Ą─ł÷║Ž; ĪĪĪĪ(7)ÖCśŗųą▀\äėĖ▒Ą─į¬╦žą╬ĀŅ║åå╬Īóęūė┌╝ė╣żųŲįņ║═▒ŻūCŠ½Č╚ĪŻ ĪĪĪĪ5.ŲĮ├µ▀BŚUÖCśŗĄ─╚▒³cŻ║ ĪĪĪĪ(1)š`▓Ņ▌^┤¾Ż¼ĮĄĄ═ÖCąĄą¦┬╩ĪŻ ĪĪĪĪ(2)▓╗╚▌ęūīŹ¼FŠ½┤_Å═ļsĄ─▀\äėęÄ┬╔ĪŻ ĪĪĪĪ(3)▓╗ę╦ė├ė┌Ė▀╦┘é„äėĪŻ ĪĪĪĪČ■ĪóŃqµ£╦─ŚUÖCśŗ ĪĪĪĪ1.Ńqµ£╦─ŚUÖCśŗĄ─ĮM│╔ ĪĪĪĪ(1)ÖC╝▄Ī¬Ī¬╣╠Č©╝■Ż¼╚ńŽ┬łD╦∙╩Šśŗ╝■4; ĪĪĪĪ(2)▀B╝▄ŚUĪ¬Ī¬┼cÖC╝▄ė├▐DäėĖ▒ŽÓ▀BĮėĄ─śŗ╝■Ż¼╚ńŽ┬łD╦∙╩Šśŗ╝■1║═śŗ╝■3; ĪĪĪĪ(3)▀BŚUĪ¬Ī¬▓╗┼cÖC╝▄ų▒ĮėŽÓ▀BĄ─śŗ╝■Ż¼╚ńŽ┬łD╦∙╩Šśŗ╝■2ĪŻ ĪĪĪĪ2.Ńqµ£╦─ŚUÖCśŗĄ─╗∙▒Šą╬╩Į ĪĪĪĪĖ∙ō■▀B╝▄ŚU▀\äėą╬╩ĮĄ─▓╗═¼Ż¼ŽÓī”ÖC╝▄─▄ū÷š¹ų▄▐DäėĄ─ĘQ×ķŪ·▒·Ż¼ų╗─▄į┌ę╗Č©ĮŪČ╚ĘČć·ā╚═∙Å═ö[äėĄ─ĘQ×ķōuŚUĪŻ▀@śėŻ¼Ńqµ£╦─ŚUÖCśŗ┐╔Ęų×ķ╚²ĘN╗∙▒Šą╬╩ĮŻ║ ĪĪĪĪ(1)Ū·▒·ōuŚUÖCśŗ:ā╔▀B╝▄ŚUųąŻ¼ę╗éĆ×ķŪ·▒·Ż¼Č°┴Ēę╗éĆ×ķōuŚUĪŻ ĪĪĪĪ(2)ļpŪ·▒·ÖCśŗ ā╔▀B╝▄ŚUŠ∙×ķŪ·▒·ĪŻ ĪĪĪĪ(3)ļpōuŚUÖCśŗ ā╔▀B╝▄ŚUŠ∙×ķōuŚUĪŻ 3.Ū·▒·ōuŚUÖCśŗ ĪĪĪĪį┌Ńqµ£╦─ŚUÖCśŗĄ─ā╔▀B╝▄ŚUųąŻ¼╚¶ę╗éĆ×ķŪ·▒·Ż¼┴Ēę╗éĆ×ķōuŚUŻ¼ät┤╦╦─ŚUÖCśŗĘQ×ķŪ·▒·ōuŚUÖCśŗĪŻ═©│ŻŪ·▒·Ą╚╦┘▐DäėŻ¼ōuŚUū„ūā╦┘═∙Å═ö[äėĪŻ ĪĪĪĪ4.ļpŪ·▒·ÖCśŗ ĪĪĪĪį┌Ńqµ£╦─ŚUÖCśŗųąŻ¼╚¶ā╔▀B╝▄ŚUŠ∙×ķŪ·▒·Ż¼ät┤╦╦─ŚUÖCśŗĘQ×ķļpŪ·▒·ÖCśŗĪŻ ĪĪĪĪ5.ļpōuŚUÖCśŗ ĪĪĪĪį┌Ńqµ£╦─ŚUÖCśŗųąŻ¼╚¶ā╔▀B╝▄ŚUŠ∙×ķōuŚUŻ¼ät┤╦╦─ŚUÖCśŗĘQ×ķļpōuŚUÖCśŗĪŻ ĪĪĪĪ6.Ū·▒·┤µį┌Ą─Śl╝■Ż║ ĪĪĪĪ(1)▀B╝▄ŚU║═ÖC╝▄ųą▒žėąę╗ŚU╩ŪūŅČ╠ŚUĪŻ ĪĪĪĪ(2)ūŅČ╠ŚU┼cūŅķLŚUķLČ╚ų«║═ąĪė┌╗“Ą╚ė┌ŲõėÓā╔ŚUķLČ╚ų«║═ĪŻ ĪĪĪĪ╔Ž╩÷ā╔éĆŚl╝■▒žĒÜ═¼ĢrØMūŃŻ¼Ę±ätÖCśŗ▓╗┤µį┌Ū·▒·ĪŻ«öØMūŃŚUķLŚl╝■ĢrŻ¼šf├„┤µį┌š¹▐DĖ▒Ż¼«ö▀xō±▓╗═¼Ą─śŗ╝■ū„×ķÖC╝▄ĢrŻ¼┐╔Ą├▓╗═¼Ą─ÖCśŗĪŻ╚ńŪ·▒·ōuŚU ĪóļpŪ·▒·Īó ļpōuŚUÖCśŗĪŻ ĪĪĪĪ(1)▀B╝▄ŚU╩ŪūŅČ╠ŚU ×ķŪ·▒·ōuŚUÖCśŗ; ĪĪĪĪ(2)ÖC╝▄╩ŪūŅČ╠ŚU ×ķļpŪ·▒·ÖCśŗ; ĪĪĪĪ(3)╚¶ūŅČ╠ŚU╩Ū▀BŚUŻ¼┤╦ÖCśŗ×ķļpōuŚUÖCśŗĪŻ╚¶ØMūŃūŅČ╠ŚU┼cūŅķLŚUķLČ╚ų«║═┤¾ė┌ŲõėÓā╔ŚUķLČ╚ų«║═Ģr,×ķļpōuŚUÖCśŗĪŻ ĪĪĪĪ╚²Īó║¼ėąę╗éĆęŲäėĖ▒Ą─ŲĮ├µ╦─ŚUÖCśŗ ĪĪĪĪ1.Ū·▒·╗¼ēKÖCśŗ ĪĪĪĪŪ·▒·╗¼ēKÖCśŗ╩Ūė├ęŲäėĖ▒╚Ī┤·Ū·▒·ōuŚUÖCśŗųąĄ─▐DäėĖ▒Č°č▌╗»Ą├ĄĮĄ─ĪŻ ĪĪĪĪŪ·▒·╗¼ēKÖCśŗė├ė┌▐Däė┼c═∙Å═ęŲäėų«ķgĄ─▀\äė▐DōQŻ¼ÅVĘ║æ¬ė├ė┌╗Ņ╚¹╩Įā╚╚╝ÖCĪó┐šÜŌē║┐sÖCĪóø_┤▓║═ūįäė╦═┴ŽÖCĄ╚ÖCąĄįOéõųąĪŻ ĪĪĪĪ2.ī¦ŚUÖCśŗ ĪĪĪĪī¦ŚUÖCśŗ┐╔┐┤│╔╩Ū═©▀^Ė─ūāŪ·▒·╗¼ēKÖCśŗųąĄ─╣╠Č©śŗ╝■č▌╗»Č°üĒĄ─ĪŻ ĪĪĪĪ3.Ū·▒·ö[äėī¦ŚUÖCśŗ ĪĪĪĪ4.ęŲäėī¦ŚUÖCśŗ ĪĪĪĪę▓ĘQ×ķČ©ēKÖCśŗĪŻ▀@ĘNÖCśŗ│Żė├ė┌│ķ╦«▀¾═▓║═│ķė═▒├ųąĪŻ ĪĪĪĪ5.ö[äėī¦ŚUÖCśŗ ĪĪĪĪ╦─ĪóŲĮ├µ╦─ŚUÖCśŗĄ─╣żū„╠žąį ĪĪĪĪ1.╝▒╗ž╠žąį ĪĪĪĪōuŚUCD╠Ä┤╦ā╔śOŽ▐╬╗ų├ĢrŪ·▒·╦∙į┌ų▒ŠĆų«ķgĄ─õJĮŪ”╚ĘQ×ķśO╬╗ŖAĮŪŻ¼ÖCśŗųą▌ö│÷╝■į┌ā╔śOŽ▐╬╗ų├ķgĄ─ęŲäėŠÓļx╗“ö[äėĮŪČ╚”šĘQ×ķąą│╠ĪŻ ĪĪĪĪŪ·▒·╗¼ēKÖCśŗŻ¼«öŲ½ą─ŠÓe=0ĢrŻ¼”╚=0Ż¼K=1Ż¼ÖCśŗ¤o╝▒╗ž╠žąį;«öŲ½ą─ŠÓe▓╗Ą╚ė┌0ĢrŻ¼”╚▓╗Ą╚ė┌0Ż¼ätK>1Ż¼ÖCśŗėą╝▒╗ž╠žąįĪŻ ĪĪĪĪ3.ē║┴”ĮŪ║═é„äėĮŪ ĪĪĪĪ╚ńŽ┬łD╦∙╩ŠĄ─Ū·▒·ōuŚUÖCśŗųąŻ¼╚ń▓╗┐╝æ]śŗ╝■Ą─ųž┴┐║═─”▓┴┴”Ż¼┐╔īóFĘųĮŌ┐╔Ą├═ŲäėōuŚUĄ─ėąą¦Ęų┴”Ft=Fcos”┴Ż¼ų╗─▄«a╔·─”▓┴ūĶ┴”Ą─ėą║”Ęų┴”Fr=Fsin”┴ĪŻ ĪĪĪĪŲõųąŻ¼”┴ĘQ×ķē║┴”ĮŪŻ¼╝┤×ķū„ė├į┌Å─äė╝■╔ŽĄ─“īäė┴”┼cįō┴”ū„ė├³cĄ─Į^ī”╦┘Č╚ĘĮŽ“ų«ķg╦∙╝ėõJĮŪĘQ×ķē║┴”ĮŪŻ¼═©│Ż░čē║┴”ĮŪū∙╬╗┼ąöÓę╗▀BŚUÖCśŗ╩ŪʱŠ▀ėą┴╝║├Ą─é„┴”ąį─▄Ą─ś╦ųŠĪŻ ĪĪĪĪ│Żęį▀BŚU┼cōuŚU╦∙ŖAõJĮŪ”├üĒ║Ō┴┐ÖCśŗĄ─é„┴”ąį─▄ĪŻ’@Č°ęūęŖŻ¼”├╝┤ē║┴”ĮŪĄ─ėÓĮŪŻ¼ĘQ×ķé„äėĮŪĪŻę“×ķ”├=90ĪŃ−”┴Ż¼╣╩”├ė·┤¾Ż¼ī”ÖCśŗé„äėė·ėą└¹ĪŻ ĪĪĪĪ4.╦└³c ĪĪĪĪ╚ńŽ┬łD╦∙╩ŠĄ─Ū·▒·ōuŚUÖCśŗųąŻ¼«öōuŚUCD×ķų„äė╝■ĪóŪ·▒·AB×ķÅ─äė╝■ĢrŻ¼«öōuŚU╠Äį┌ā╔éĆśOŽ▐╬╗ų├ĢrŻ¼▀BŚUBC┼cŪ·▒·AB╣▓ŠĆĪŻ╚¶▓╗ėŗĖ„śŗ╝■┘|┴┐Ż¼ät▀@Ģr▀BŚU╝ėĮoŪ·▒·Ą─┴”īó═©▀^Ńqµ£AĄ─ųąą─Ż¼▀@Ģr▀BŚUBC¤ošōĮoÅ─äė╝■Ū·▒·ABĄ─┴”ČÓ├┤┤¾Č╝▓╗─▄═ŲäėŪ·▒·▀\äėŻ¼ÖCśŗ╦∙╠ÄĄ─▀@ĘN╬╗ų├ĘQ×ķ╦└³c╬╗ų├ĪŻ ĪĪĪĪį┌īŹļHæ¬ė├ųąę▓ėą└¹ė├╦└³c╬╗ų├Ą─ąį┘|üĒ▀Mąą╣żū„Ą─ĪŻ╚ńŽ┬łD╦∙╩Š┐ņ╦┘ŖAŠ▀Ż¼ÖCśŗ╠Äė┌╦└³c╬╗ų├Ż¼į┌╚ź│²═Ō┴”F║¾╚į┐╔╝ėŠo╣ż╝■Č°▓╗ūįäė├ō┬õĪŻų╗ėąŽ“╔Ž░Ōäė╩ų▒·3ĘĮ┐╔╦╔ķ_ŖAŠ▀ĪŻ ĪĪĪĪ╬ÕĪóŲĮ├µ╦─ŚUÖCśŗĄ─įOėŗ ĪĪĪĪ1.╦─ŚUÖCśŗįOėŗŚl╝■ ĪĪĪĪ(1)ĮoČ©╬╗ų├╗“▀\äėęÄ┬╔Ż¼╚ń▀BŚU╬╗ų├Īó▀B╝▄ŚUī”æ¬╬╗ų├╗“ąą│╠╦┘Č╚ūā╗»ŽĄöĄĄ╚ĪŻ ĪĪĪĪ(2)ĮoČ©▀\äė▄ē█EŻ¼╚ńę¬Ū¾ŲųžÖCųąĄ§Ń^Ą─▄ē█E×ķę╗ų▒ŠĆ;öć├µÖCųąöć░ĶŚUČ╦─▄░┤ŅAČ©▄ē█E▀\äėĄ╚Ż¼▀@ą®Č╝╩Ū▀BŚU╔ŽĄ─³cĄ─▄ē█EĪŻ×ķ┴╦╩╣ÖCśŗįOėŗĄ─║Ž└ĒĪó┐╔┐┐Ż¼▀Ćæ¬┐╝æ]Äū║╬Śl╝■║═é„┴”ąį─▄ę¬Ū¾Ą╚ĪŻ ĪĪĪĪ2.╦─ŚUÖCśŗĄ─įOėŗĘĮĘ© ĪĪĪĪ(1)ęčų¬▀BŚUĄ─ā╔éĆ╬╗ų├Īó╝░ŲõķLČ╚Ż¼įOėŗŃqµ£╦─ŚUÖCśŗĪŻ ĪĪĪĪ(2)░┤ĮoČ©▀BŚU╚²éĆ╬╗ų├įOėŗ╦─ŚUÖCśŗ ĪĪĪĪ(3)░┤ĮoČ©Ą─ąą│╠╦┘Č╚ūā╗»ŽĄöĄįOėŗ╦─ŚUÖCśŗ 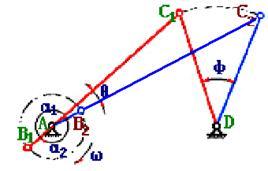
 ĪĪĪĪē║┴”ĮŪ┼cé„äėĮŪ
ĪĪĪĪē║┴”ĮŪ┼cé„äėĮŪ

 ĪĪĪĪŃqµ£╦─ŚUÖCśŗ
ĪĪĪĪŃqµ£╦─ŚUÖCśŗ
 ĪĪĪĪ
ĪĪĪĪ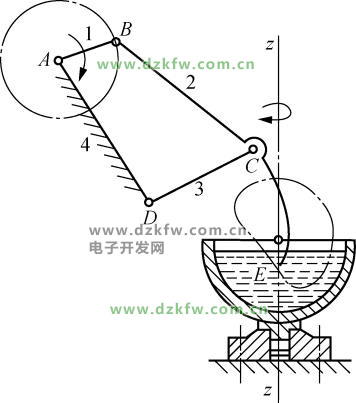 ĪĪĪĪöć░ĶÖC
ĪĪĪĪöć░ĶÖC
 ĪĪĪĪŲĮąą╦─▀ģą╬ÖCśŗ║═Ę┤ŲĮąą╦─▀ģą╬ÖCśŗ
ĪĪĪĪŲĮąą╦─▀ģą╬ÖCśŗ║═Ę┤ŲĮąą╦─▀ģą╬ÖCśŗ
 ĪĪĪĪ·Q╩ĮŲųžÖC
ĪĪĪĪ·Q╩ĮŲųžÖC
 ĪĪĪĪŪ·▒·╗¼ēKÖCśŗŻ║(ū¾)ī”ą─Ū·▒·╗¼ēKÖCśŗ;(ėę)Ų½ų├Ū·▒·╗¼ēKÖCśŗ
ĪĪĪĪŪ·▒·╗¼ēKÖCśŗŻ║(ū¾)ī”ą─Ū·▒·╗¼ēKÖCśŗ;(ėę)Ų½ų├Ū·▒·╗¼ēKÖCśŗ
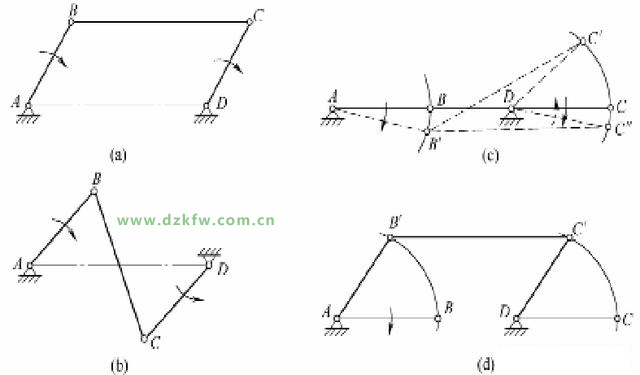
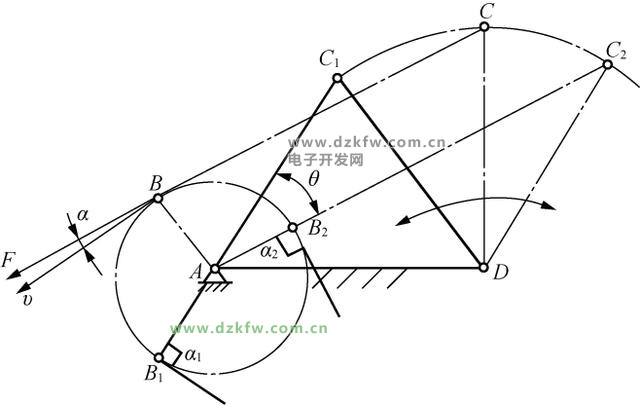
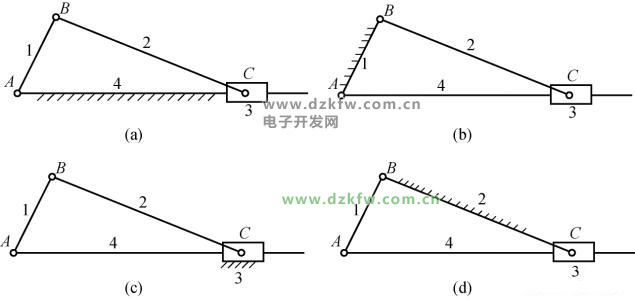 ĪĪĪĪ(a)ī”ą─Ū·▒·╗¼ēKÖCśŗ;(b)Ū·▒·▐Däėī¦ŚUÖCśŗ;(c)ęŲäėī¦ŚUÖCśŗ;(d)ö[äėī¦ŚUÖCśŗ
ĪĪĪĪ(a)ī”ą─Ū·▒·╗¼ēKÖCśŗ;(b)Ū·▒·▐Däėī¦ŚUÖCśŗ;(c)ęŲäėī¦ŚUÖCśŗ;(d)ö[äėī¦ŚUÖCśŗ
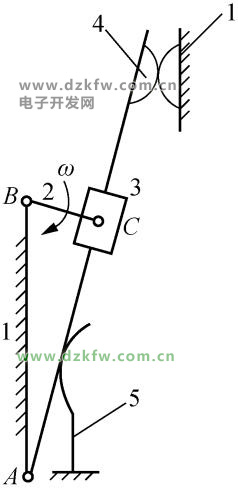 ĪĪĪĪŪ·▒·ö[äėī¦ŚUÖCśŗį┌ļŖŲ„ķ_ĻPųąĄ─æ¬ė├
ĪĪĪĪŪ·▒·ö[äėī¦ŚUÖCśŗį┌ļŖŲ„ķ_ĻPųąĄ─æ¬ė├
 ĪĪĪĪ│ķ╦«▀¾═▓
ĪĪĪĪ│ķ╦«▀¾═▓
 ĪĪĪĪŲ¹▄ćūįäėąČ┴ŽÖCśŗ
ĪĪĪĪŲ¹▄ćūįäėąČ┴ŽÖCśŗ
 ĪĪĪĪŠC╔Ž╦∙╩÷Ż¼į┌▌ö╚ļ╝■Ū·▒·ū„Ą╚╦┘▐DäėĢrŻ¼ū„═∙Å═ö[äėĄ─▌ö│÷╝■ōuŚUį┌┐š▌dąą│╠ųąĄ─ŲĮŠ∙╦┘Č╚┤¾ė┌╣żū„ąą│╠ųąĄ─ŲĮŠ∙╦┘Č╚Ż¼▀@ę╗ąį┘|ĘQ×ķ▀BŚUÖCśŗĄ─╝▒╗ž╠žąįĪŻ═©│Żė├ąą│╠╦┘Č╚ūā╗»ŽĄöĄKüĒ▒Ē╩Š▀@ĘN╠žąįŻ║
ĪĪĪĪŠC╔Ž╦∙╩÷Ż¼į┌▌ö╚ļ╝■Ū·▒·ū„Ą╚╦┘▐DäėĢrŻ¼ū„═∙Å═ö[äėĄ─▌ö│÷╝■ōuŚUį┌┐š▌dąą│╠ųąĄ─ŲĮŠ∙╦┘Č╚┤¾ė┌╣żū„ąą│╠ųąĄ─ŲĮŠ∙╦┘Č╚Ż¼▀@ę╗ąį┘|ĘQ×ķ▀BŚUÖCśŗĄ─╝▒╗ž╠žąįĪŻ═©│Żė├ąą│╠╦┘Č╚ūā╗»ŽĄöĄKüĒ▒Ē╩Š▀@ĘN╠žąįŻ║ 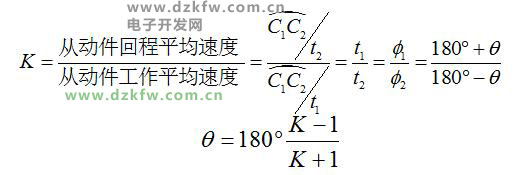 ĪĪĪĪÖCśŗĄ─╝▒╗ž╦┘Č╚╚ĪøQė┌ŖAĮŪ”╚Ą─┤¾ąĪĪŻ”╚įĮ┤¾Ż¼KųĄįĮ┤¾Ż¼ÖCśŗĄ─╝▒╗ž│╠Č╚ę▓įĮĖ▀Ż¼Ą½Å─┴Ēę╗ĘĮ├µ┐┤Ż¼ÖCśŗ▀\äėĄ─ŲĮĘĆąįŠ═įĮ▓ŅĪŻ ĪĪĪĪ2.Ū·▒·╗¼ēKÖCśŗ╝▒╗ž╠žąį
ĪĪĪĪÖCśŗĄ─╝▒╗ž╦┘Č╚╚ĪøQė┌ŖAĮŪ”╚Ą─┤¾ąĪĪŻ”╚įĮ┤¾Ż¼KųĄįĮ┤¾Ż¼ÖCśŗĄ─╝▒╗ž│╠Č╚ę▓įĮĖ▀Ż¼Ą½Å─┴Ēę╗ĘĮ├µ┐┤Ż¼ÖCśŗ▀\äėĄ─ŲĮĘĆąįŠ═įĮ▓ŅĪŻ ĪĪĪĪ2.Ū·▒·╗¼ēKÖCśŗ╝▒╗ž╠žąį
 ĪĪĪĪŲ½ų├Ū·▒·╗¼ēKÖCśŗ
ĪĪĪĪŲ½ų├Ū·▒·╗¼ēKÖCśŗ
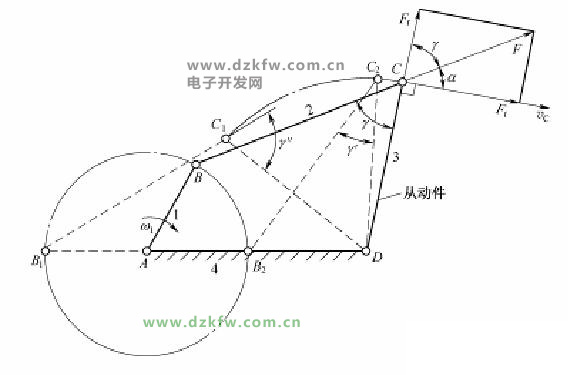 ĪĪĪĪē║┴”ĮŪ║═é„äėĮŪ
ĪĪĪĪē║┴”ĮŪ║═é„äėĮŪ
 ĪĪĪĪ╦└³c╬╗ų├
ĪĪĪĪ╦└³c╬╗ų├
 ĪĪĪĪ╦└³cĄ─æ¬ė├
ĪĪĪĪ╦└³cĄ─æ¬ė├
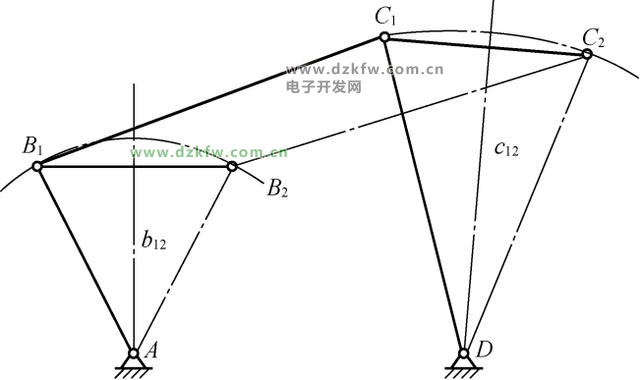 ĪĪĪĪęčų¬▀BŚUā╔╬╗ų├įOėŗŃqµ£╦─ŚUÖCśŗ
ĪĪĪĪęčų¬▀BŚUā╔╬╗ų├įOėŗŃqµ£╦─ŚUÖCśŗ
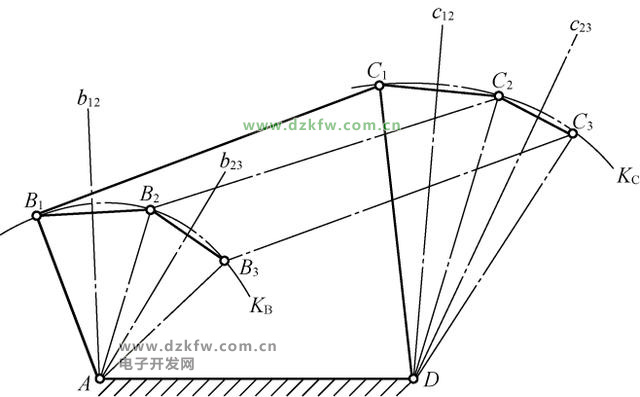 ĪĪĪĪ░┤ĮoČ©▀BŚU╚²éĆ╬╗ų├įOėŗ╦─ŚUÖCśŗ
ĪĪĪĪ░┤ĮoČ©▀BŚU╚²éĆ╬╗ų├įOėŗ╦─ŚUÖCśŗ
 ĪĪĪĪ░┤ĮoČ©Ą─ąą│╠╦┘Č╚ūā╗»ŽĄöĄįOėŗ╦─ŚUÖCśŗ
ĪĪĪĪ░┤ĮoČ©Ą─ąą│╠╦┘Č╚ūā╗»ŽĄöĄįOėŗ╦─ŚUÖCśŗ
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū