
1¡¢Ö±Á÷ëC(j¨©)º(ji¨£n)½é
2¡¢ÔO(sh¨¨)Ó(j¨¬)ÖеÄÈı(g¨¨)êP(gu¨¡n)×¢üc(di¨£n)
3¡¢Hòë·
4¡¢ò(q¨±)Ó(d¨°ng)оƬßxñr(sh¨ª)¿¼]µÄ(w¨¨n)î}
5¡¢L298оƬ¼°ò(q¨±)Ó(d¨°ng)Ä£K
6¡¢ëC(j¨©)Õı·´ŞD(zhu¨£n)³ÌĞò
7¡¢ëpëC(j¨©)²îËÙŞD(zhu¨£n)ÏòµÄÔÀí
8¡¢ÀûÓòîËÙ(sh¨ª)¬F(xi¨¤n)Ğ¡ÔԵشòŞD(zhu¨£n)³ÌĞò
1¡¢Ö±Á÷ëC(j¨©)º(ji¨£n)½é
Ö±Á÷ëC(j¨©)ÊÇÖÇÄÜĞ¡Ü(ch¨¥)¼°C(j¨©)Æ÷ÈËÖÆ×÷±Ø²»¿ÉÉٵĽM³É²¿·Ö£¬ËüÖ÷Òª×÷ÓÃÊÇéϵ½y(t¨¯ng)Ìṩ±ØíµÄò(q¨±)Ó(d¨°ng)Á¦£¬ÓÃÒÔ(sh¨ª)¬F(xi¨¤n)Æä¸÷·Nß\(y¨´n)Ó(d¨°ng)¡£Ä¿Ç°ÊĞÃæµÄÖ±Á÷ëC(j¨©)Ö÷Òª·ÖéÆÕͨëC(j¨©)ºÍ§Ó(d¨°ng)ıXİ÷Ó(d¨°ng)C(j¨©)(g¨°u)µÄÖ±Á÷pËÙëC(j¨©)¡£ÈçD1ºÍD2Ëùʾ¡£


D1 ÈÕ±¾ñR²½Ææ¸ßËÙëC(j¨©)RS380 D2 N20pËÙÖ±Á÷ëC(j¨©)
¦(du¨¬)ÓÚ²»Ì«×·ÇóËٶȵÄö(ch¨£ng)ºÏª(y¨©ng)(y¨u)ÏÈßxÓÃpËÙÖ±Á÷ëC(j¨©)£¬Èç×ãÇòC(j¨©)Æ÷ºÍç»ğC(j¨©)Æ÷È˵È×·Çó¹¦Äܶø¦(du¨¬)ËÙ¶ÈÒªÇ󲻸ߵÄö(ch¨£ng)ºÏ£¬ÈçD3£¬´ËÜ(ch¨¥)µÄ÷Ó(d¨°ng)±Èͨ³£é×Ê®µ½×°Ù×óÓÒ¡£Ò»°ã¦(du¨¬)ͬһĞÍÌ(h¨¤o)µÄpËÙëC(j¨©)£¬S(ch¨£ng)¼Ò¶¼ş(hu¨¬)Ìṩ¶à·N÷Ó(d¨°ng)±ÈµÄ®a(ch¨£n)Æ·Ìṩ½oÓÃô(h¨´)£¬ª(y¨©ng)¸ùş(j¨´)ĞèÒª¼ÓÒÔßxñ¡£

D3 ÆÕͨpËÙëC(j¨©)ª(y¨©ng)ÓÃ
¶ø¦(du¨¬)ÓÚÆÕֱͨÁ÷ëC(j¨©)£¬ÓÉÓÚŞD(zhu¨£n)ËÙ±Èİ^¸ß£¬¾ßówª(y¨©ng)ÓÃr(sh¨ª)ª(y¨©ng)¼ÓıXİ÷Ó(d¨°ng)C(j¨©)(g¨°u)£¬®(d¨¡ng)ȻҲ¿ÉÒÔÖ±½ÓßxñpËÙÖ±Á÷ëC(j¨©)£¬µ«Èç¹û¦(du¨¬)ÓÚһЩËÙ¶ÈÒªÇó±Èİ^¸ßµÄª(y¨©ng)Óã¬Èçïw˼¿¨ ÖÇÄÜÜ(ch¨¥)Ü(ch¨¥)Ä££¬ÓÉÓÚÔ±ÈÙÙÓÚ¸(j¨¬ng)ËÙÙ£¬¦(du¨¬)ËÙ¶ÈÒªÇó±Èİ^¸ß£¬ÊĞÃæÉÏÒ»°ãºÜëyÕÒµ½ºÏßmµÄpËÙëC(j¨©)£¬´Ër(sh¨ª)¾ÍĞèÒª×Ô¼ºÔO(sh¨¨)Ó(j¨¬)pËÙC(j¨©)(g¨°u)£¬ÈçD4éïw˼¿¨ µÄëC(j¨©)ºÍpËÙC(j¨©)(g¨°u)D£¬´Ë÷Ó(d¨°ng)C(j¨©)(g¨°u)÷Ó(d¨°ng)±Èé1£º10×óÓÒ£¬Ê¹µÃĞ¡Ü(ch¨¥)ÔÚ¿ÕİdµÄÇérÏ¿Éß_(d¨¢)µ½ÉÏǧŞD(zhu¨£n)¡£

D4 ïw˼¿¨ ÖÇÄÜÜ(ch¨¥)BÜ(ch¨¥)Ä£
o(w¨²)ÕÊÇÆÕֱͨÁ÷ëC(j¨©)ßÊÇpËÙëC(j¨©)£¬ÆäëC(j¨©)²¿·ÖÄ¿Ç°»ù±¾¶¼ÊÇo(w¨²)Ë¢Ö±Á÷ëC(j¨©)£¬êP(gu¨¡n)ÓÚʲô½Ğo(w¨²)ëC(j¨©)ÒÔ¼°È(n¨¨i)²¿½Y(ji¨¦)(g¨°u)ÈçºÎ£¬ß@ÀïÎÒ²»È¥É£¬ÏÂÃæÖØüc(di¨£n)½é½BÒ»ÏÂÖ±Á÷ëC(j¨©)ÔÚ(sh¨ª)ëHʹÓÃß^(gu¨°)³ÌÔÚÓ²¼şµÄÔO(sh¨¨)Ó(j¨¬)¼°Ü¼şµÄ¾(xi¨§)ÖЪ(y¨©ng)®(d¨¡ng)êP(gu¨¡n)×¢µÄÈı(g¨¨)·½Ã棬ß@ÀïµÄÇ°ÌáÊÇÄãÒѽ(j¨©ng)¸ùş(j¨´)ĞèÒªßxñºÃÁ˺Ïßm÷Ó(d¨°ng)±ÈµÄëC(j¨©)¡£
2¡¢ÔO(sh¨¨)Ó(j¨¬)ÖеÄÈı(g¨¨)êP(gu¨¡n)×¢üc(di¨£n)
1£© ÈçºÎÔö´óò(q¨±)Ó(d¨°ng)
2£© ÈçºÎ(sh¨ª)¬F(xi¨¤n)QÏò
3£© ÈçºÎ(sh¨ª)¬F(xi¨¤n)Õ{(di¨¤o)ËÙ
¦(du¨¬)ÓÚµÚÒ»(g¨¨)(w¨¨n)î}£¬Ö÷ÒªÔÒòÊÇëC(j¨©)ÙÓÚ´ó¹¦ÂʵÄÆ÷¼ş£¬¶øÎƬC(j¨©)µÄI/O¿ÚËùÌṩµÄëÁ÷ÍùÍùÊ®Èf(w¨¤n)ÓĞÏŞ£¬ËùÒÔ±ØíÍâ¼Óò(q¨±)Ó(d¨°ng)ë·£¬±ÈÈçÕf(shu¨)ÓÉÈıO¹Ü½M³É·Å´óë·¡£
¦(du¨¬)ÓÚµÚ¶ş(g¨¨)(w¨¨n)î}£¬Ö±Á÷ëC(j¨©)µÄ·½Ïò¸Ä×ĞèÒª¸Ä×ëC(j¨©)µÄOĞÔ£¬¼´ÕıØ(f¨´)·´½Ó£¬µ«Ä¿Ç°´ó¶àµ(sh¨´)C(j¨©)Æ÷ÈËÖÆ×÷ÖĞʹÓõÄÊÇÖ±Á÷o(w¨²)Ë¢ëC(j¨©)£¬ÓÉÓÚ](m¨¦i)ÓĞëË¢£¬¶ø¹©ëëԴͨ³£ÓÖéÎëÔ´£¬ËùÒÔĞèÒªÔO(sh¨¨)Ó(j¨¬)Ò»(g¨¨)ë×Óé_(k¨¡i)êP(gu¨¡n)ÒÔ(sh¨ª)¬F(xi¨¤n)QÏò¹¦ÄÜ¡£
¦(du¨¬)ÓÚµÚÈı(g¨¨)(w¨¨n)î}£¬C(j¨©)Æ÷ÈËÊÇÒ»(g¨¨)Ğèßmª(y¨©ng)²»Í¬h(hu¨¢n)¾³µÄÖÇÄÜów£¬Æäß\(y¨´n)Ó(d¨°ng)ËÙ¶ÈĞèÒª²»àµÄ¸Ä×£¬´Ër(sh¨ª)¾ÍĞèÒªÏë·¨ÔO(sh¨¨)Ó(j¨¬)Ïàª(y¨©ng)ë·ÒÔ(sh¨ª)¬F(xi¨¤n)Õ{(di¨¤o)Ëٶȡ£
ÉÏÃæµÄÈı(g¨¨)(w¨¨n)î}ÊÇëC(j¨©)¿ØÖÆÖбØíÒª¿¼]µÄ(w¨¨n)î}£¬¿ÉÒÔͨß^(gu¨°)Ó²¼şµÄ·½·¨(sh¨ª)¬F(xi¨¤n)£¬Ò²¿ÉÒÔͨß^(gu¨°)ܼşµÄ·½·¨(sh¨ª)¬F(xi¨¤n)£¬®(d¨¡ng)ȻҲ¿ÉÒÔ²ÉȡӲܽY(ji¨¦)ºÏµÄ·½·¨½âQ¡£Ä¿Ç°±Èİ^ͨÓõķ½·¨ÊÇ£¬ÔO(sh¨¨)Ó(j¨¬)Hòë·ºÍÀûÓÃÎƬC(j¨©)®a(ch¨£n)ÉúPWM²¨ĞÅÌ(h¨¤o)¡£
Hòë·ÊÇÓÃÓ²¼şµÄ·½·¨ÔO(sh¨¨)Ó(j¨¬)Ò»(g¨¨)ë·£¬Ëü¿ÉÒÔ½âQÇ°ÃæÉ(g¨¨)(w¨¨n)î}¡£¶øµÚÈı(g¨¨)(w¨¨n)î}ËٶȵÄÕ{(di¨¤o)¹(ji¨¦)tÊÇͨß^(gu¨°)ܼşµÄ·½·¨£¬ÀûÓÃÎƬC(j¨©)I/O¿ÚÉú®a(ch¨£n)PWM²¨ĞÅÌ(h¨¤o)¼ÓÒÔ(sh¨ª)¬F(xi¨¤n)¡£
ß@Ò»¹(ji¨¦)ÎÒÖ÷Òª½é½BHòë·£¬ºóÃæµÄÕ¹(ji¨¦)ÎÒş(hu¨¬)£(zhu¨¡n)éT(m¨¦n)½é½Bµ½PWMÕ{(di¨¤o)ËÙ(w¨¨n)î}¡£
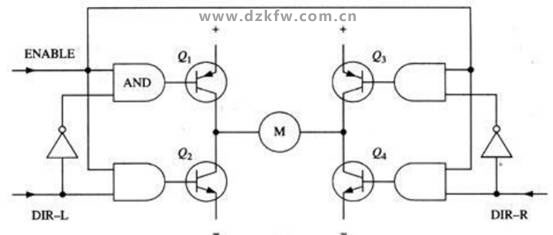
3¡¢Hòë·
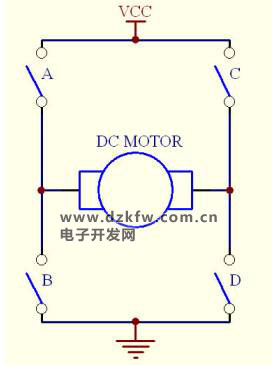
ëC(j¨©)×öºÃºóºóÒı³öÉ(g¨¨)O£¬ÈçD5Ëùʾ£¬½oÉ(g¨¨)OÄÜë¾ÍÄÜò?q¨±)¬F(xi¨¤n)ÆäŞD(zhu¨£n)Ó(d¨°ng)£¬¶ø¸Ä×ÆäëÔ´OĞÔ¿ÉÒÔ(sh¨ª)¬F(xi¨¤n)QÏò¡£

D5 pËÙëC(j¨©)¼°ë·D
Ç°ÃæÎÒÕf(shu¨)ß^(gu¨°)±ØíÒª½âQò(q¨±)Ó(d¨°ng)Á¦²»×ãºÍQÏò(w¨¨n)î}£¬ÔO(sh¨¨)Ó(j¨¬)Ò»°ãş(hu¨¬)²ÉÓÃÉ·N·½·¨£¬Ò»ÊÇÔO(sh¨¨)Ó(j¨¬)ÓÉ·ÖëxÔª¼ş½M³ÉµÄò(q¨±)Ó(d¨°ng)ë·(sh¨ª)¬F(xi¨¤n)£¬ÁíÒ»·N·½·¨tÊDzÉÓã(zhu¨¡n)ÓõÄò(q¨±)Ó(d¨°ng)оƬ¼ÓÒÔ(sh¨ª)¬F(xi¨¤n)¡£ÓÉÓÚ£(zhu¨¡n)ÓõÄò(q¨±)Ó(d¨°ng)оƬÓÉÓÚ½Y(ji¨¦)(g¨°u)º(ji¨£n)Ρ¢r(ji¨¤)¸ñ±ãÒË¡¢¿É¿¿ĞԸߵÈÌØüc(di¨£n)£¬Òò¶ø±»V·ºµÄª(y¨©ng)ÓÃ(sh¨ª)¬F(xi¨¤n)ëC(j¨©)µÄò(q¨±)Ó(d¨°ng)¡£ëC(j¨©)µÄò(q¨±)Ó(d¨°ng)оƬºÜ¶àÈçL298N¡¢BST7970¡¢MC33886µÈ£¬ß@ÀïÎÒ½é½BÖÇÄÜC(j¨©)Æ÷ÈËÖбÈİ^³£ÓõÄLM298Nò(q¨±)Ó(d¨°ng)Ä£K£¬BST7970¡¢MC33886Ò»°ãÔÚëC(j¨©)¹¦ÂʱÈİ^´óµÄö(ch¨£ng)ºÏßmÓá£ÔÚ½é½BLM298Nò(q¨±)Ó(d¨°ng)Ä£K֮ǰ£¬ÎÒÏȽé½BÒ»ÏÂHòë·£¬ĞèÒªÕf(shu¨)Ã÷µÄÊÇr(sh¨ª)£¬ÔÚÏÂÃæµÄë·ÓÉÓÚÈ(n¨¨i)²¿²ÉÓÃÁËÈıO¹Ü£¬ÈıO¹Ü±¾ÉíÆğµ½·Å´óµÄ×÷Ó㬼´Ôö´óÁËò(q¨±)Ó(d¨°ng)ëÁ÷£¬ËùÒÔÔÚÏÂÃæµÄÖv½âÖĞÎÒÖ÷ÒªÈ(c¨¨)ÖØÖv½âÈçºÎ(sh¨ª)¬F(xi¨¤n)QÏò¹¦ÄÜ¡£
Hòë·¿ÉÒÔÓÃÈçD6í(l¨¢i)±íʾÆäÔÀí£º
D6 Hòº(ji¨£n)Îë·
ÄDÖĞ¿ÉÒÔ¿´³ö£¬ÆäĞÎ îî(l¨¨i)ËÆÓÚ×Öĸ¡°H¡±,×÷éØ(f¨´)İdµÄÖ±Á÷ëC(j¨©)Ïñ¡°ò¡±Ò»Ó¼ÜÔÚÉÏÃ棬ËùÒÔ·Q(ch¨¥ng)é¡°Hòò(q¨±)Ó(d¨°ng)¡±£¬4(g¨¨)é_(k¨¡i)êP(gu¨¡n)ËùÔÚµÄλÖþͷQ(ch¨¥ng)é¡°ò±Û¡±¡£
ÄDÖĞ¿ÉÒÔ¿´³ö£¬¼ÙÔO(sh¨¨)é_(k¨¡i)êP(gu¨¡n)A¡¢D½Óͨ£¬ëC(j¨©)ÕıÏòŞD(zhu¨£n)Ó(d¨°ng)£¬¶øé_(k¨¡i)êP(gu¨¡n)B¡¢C½Óͨr(sh¨ª)£¬Ö±Á÷ëC(j¨©)¢·´ÏòŞD(zhu¨£n)Ó(d¨°ng)£¬Ä¶ø(sh¨ª)¬F(xi¨¤n)ÁËëC(j¨©)µÄÕı·´¿ØÖÆ¡£®(d¨¡ng)È»(sh¨ª)ëHª(y¨©ng)ÓÃÖĞÎÒß¿ÉÒԵõ½ÆäËüÉ·N îB(t¨¤i):
1£©xÜ(ch¨¥)£¬¼´¢A¡¢C»òB¡¢D½Óͨ£¬tëC(j¨©)TĞÔŞD(zhu¨£n)Ó(d¨°ng)®a(ch¨£n)ÉúµÄëÓ(d¨°ng)İ(sh¨¬)¢±»¶Ì·£¬ĞγÉ×èµKß\(y¨´n)Ó(d¨°ng)µÄ¸Ğª(y¨©ng)ëÁ÷£¬é_(k¨¡i)³É¡°xÜ(ch¨¥)¡±×÷Óá£
2£©¶èĞĞ£¬4(g¨¨)é_(k¨¡i)êP(gu¨¡n)È«²¿àé_(k¨¡i)£¬tëC(j¨©)TĞÔËù®a(ch¨£n)ÉúµÄëÓ(d¨°ng)İ(sh¨¬)¢o(w¨²)·¨é_(k¨¡i)³Éë·£¬Ä¶øÒ²¾Í²»ş(hu¨¬)®a(ch¨£n)Éú×èµKß\(y¨´n)Ó(d¨°ng)µÄ¸Ğª(y¨©ng)ëÁ÷£¬ëC(j¨©)¢TĞÔŞD(zhu¨£n)Ó(d¨°ng)İ^éL(zh¨£ng)r(sh¨ª)ég¡£
ÒÔÉÏë·ֻÊÇÕf(shu¨)Ã÷µÄÔÀí£¬(sh¨ª)ëHë·ÖĞÎÒͨ³£¢í(l¨¢i)ËÄ(g¨¨)é_(k¨¡i)êP(gu¨¡n)Q³ÉÈıO¹Ü¡£ÈçD7Ëùʾ£¬HòʽëC(j¨©)ò(q¨±)Ó(d¨°ng)ë·°üÀ¨4(g¨¨)ÈıO¹ÜºÍÒ»(g¨¨)ëC(j¨©)¡£ÒªÊ¹ëC(j¨©)ß\(y¨´n)ŞD(zhu¨£n)£¬±Øí§(d¨£o)ͨ¦(du¨¬)½Ç¾(xi¨¤n)ÉϵÄÒ»¦(du¨¬)ÈıO¹Ü¡£¸ùş(j¨´)²»Í¬ÈıO¹Ü¦(du¨¬)µÄ§(d¨£o)ͨÇér£¬ëÁ÷¿ÉÄÜş(hu¨¬)Ä×óÖÁÓÒ»òÄÓÒÖÁ×óÁ÷ß^(gu¨°)ëC(j¨©)£¬Ä¶ø¿ØÖÆëC(j¨©)µÄŞD(zhu¨£n)Ïò¡£ÓÉÓÚHòë·¿ÉÒԺܷ½±ãµÄ(sh¨ª)¬F(xi¨¤n)ëC(j¨©)µÄÕı·´ŞD(zhu¨£n)µÄò(q¨±)Ó(d¨°ng)Òò¶øµÃµ½ÁËV·ºª(y¨©ng)Óá£
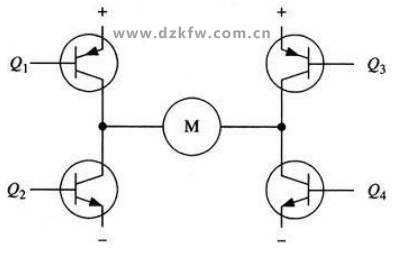
D7 µäĞ͵ÄHòë·
ҪʹëC(j¨©)ß\(y¨´n)ŞD(zhu¨£n)£¬±Øíʹ¦(du¨¬)½Ç¾(xi¨¤n)ÉϵÄÒ»¦(du¨¬)ÈıO¹Ü§(d¨£o)ͨ¡£ÀıÈ磬ÈçDD8Ëùʾ£¬®(d¨¡ng)Q1¹ÜºÍQ4¹Ü§(d¨£o)ͨr(sh¨ª)£¬ëÁ÷¾ÍÄëÔ´ÕıO½(j¨©ng)Q1Ä×óÖÁÓÒ´©ß^(gu¨°)ëC(j¨©)£¬È»ºóÔÙ½(j¨©ng)Q4»Øµ½ëÔ´Ø(f¨´)O¡£°´DÖĞëÁ÷¼ıî^Ëùʾ£¬ÔÁ÷ÏòµÄëÁ÷¢ò(q¨±)Ó(d¨°ng)ëC(j¨©)ír(sh¨ª)áŞD(zhu¨£n)Ó(d¨°ng)¡£®(d¨¡ng)ÈıO¹ÜQ1ºÍQ4§(d¨£o)ͨr(sh¨ª)£¬ëÁ÷¢Ä×óÖÁÓÒÁ÷ß^(gu¨°)ëC(j¨©)£¬Ä¶øò(q¨±)Ó(d¨°ng)ëC(j¨©)°´Ìض¨µÄ·½ÏòŞD(zhu¨£n)Ó(d¨°ng)¡£
D9ËùʾéÁíÒ»¦(du¨¬)ÈıO¹ÜQ2ºÍQ3§(d¨£o)ͨµÄÇér£¬ëÁ÷ÄÓÒÖÁ×óÁ÷ß^(gu¨°)ëC(j¨©)¡£®(d¨¡ng)ÈıO¹ÜQ2ºÍQ3§(d¨£o)ͨr(sh¨ª)£¬ëÁ÷¢ÄÓÒÖÁ×óÁ÷ß^(gu¨°)ëC(j¨©)£¬Ä¶øò(q¨±)Ó(d¨°ng)ëC(j¨©)ÑØÁíÒ»·½ÏòŞD(zhu¨£n)Ó(d¨°ng)¡£
ß@ÀïĞèҪעÒâµÄÊÇ£¬ëC(j¨©)Ò»°ãş(hu¨¬)Òı³öÉ(g¨¨)O£¬µ«²¢o(w¨²)ÕıØ(f¨´)Ö®·Ö£¬ËùÖ^µÄÕı·´ŞD(zhu¨£n)Ò²Ö»ÊÇÎÒ?n¨¨i)Ë鶨Áx£¬¾ßówÒª¿´(sh¨ª)ëHµÄª(y¨©ng)ÓúͰ²ÑbÇér¡£
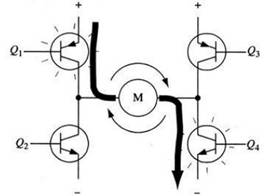
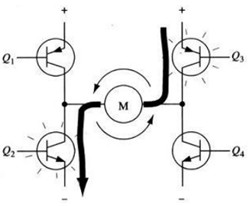
D8 ëC(j¨©)ÕıŞD(zhu¨£n) D9 ëC(j¨©)·´ŞD(zhu¨£n)
ò(q¨±)Ó(d¨°ng)ëC(j¨©)r(sh¨ª)£¬±£×CHòÉÏÉ(g¨¨)ͬÈ(c¨¨)µÄÈıO¹Ü²»ş(hu¨¬)ͬr(sh¨ª)§(d¨£o)ͨ·Ç³£ÖØÒª£¬Èç¹ûÈıO¹ÜQ1ºÍQ2ͬr(sh¨ª)§(d¨£o)ͨ£¬ÄÇôëÁ÷¾Íş(hu¨¬)ÄÕıO´©ß^(gu¨°)É(g¨¨)ÈıO¹ÜÖ±½Ó»Øµ½Ø(f¨´)O£¬´Ër(sh¨ª)ë·ÖгıÁËÈıO¹ÜÍâ](m¨¦i)ÓĞÆäËüÈκÎØ(f¨´)İd£¬Òò´Ëë·ÉϵÄëÁ÷¾Í¿ÉÄÜß_(d¨¢)µ½×î´óÖµ£¨ÔëÁ÷HÊÜëÔ´ĞÔÄÜÏŞÖÆ£©£¬ÉõÖÁıÄÈıO¹Ü¡£»ùÓÚÉÏÊöÔÒò£¬ÔÚ(sh¨ª)ëHò(q¨±)Ó(d¨°ng)ë·ÖĞͨ³£ÒªÓÃÓ²¼şë··½±ãµØ¿ØÖÆÈıO¹ÜµÄé_(k¨¡i)êP(gu¨¡n)¡£
D10Ëùʾ¾ÍÊÇ»ùÓÚß@·N¿¼]µÄ¸ÄßM(j¨¬n)ë·£¬ËüÔÚ»ù±¾µÄHò뷵ĻùµA(ch¨³)ÉÏÔö¼ÓÁË4(g¨¨)ÅcéT(m¨¦n)ºÍ2(g¨¨)·ÇéT(m¨¦n)¡£4(g¨¨)ÅcéT(m¨¦n)ͬһ(g¨¨)ʹÄܧ(d¨£o)ͨĞÅÌ(h¨¤o)Ïà½Ó£¬ß@Ó£¬ÓÃß@Ò»(g¨¨)ĞÅÌ(h¨¤o)¾ÍÄÜ¿ØÖÆÕû(g¨¨)ë·µÄé_(k¨¡i)êP(gu¨¡n)¡£¶ø2(g¨¨)·ÇéT(m¨¦n)ͨß^(gu¨°)Ìṩһ·N·½ÏòİÈ룬¿ÉÒÔ±£×CÈκÎr(sh¨ª)ºòÔÚHòµÄͬÈ(c¨¨)¶¼Ö»ÓĞÒ»(g¨¨)ÈıO¹Ü§(d¨£o)ͨ¡£
D10 ¸ÄßM(j¨¬n)ºóµÄHòò(q¨±)Ó(d¨°ng)ë·
²ÉÓÃÒÔÉÏ·½·¨£¬ëC(j¨©)µÄß\(y¨´n)ŞD(zhu¨£n)Ö»ĞèÒªÈı(g¨¨)ĞÅÌ(h¨¤o)¿ØÖÆ£¬ÈçD11£ºÉ(g¨¨)·½ÏòĞÅÌ(h¨¤o)ºÍÒ»(g¨¨)ʹÄÜĞÅÌ(h¨¤o)¡£Èç¹ûDIR£LĞÅÌ(h¨¤o)é0£¬DIR£RĞÅÌ(h¨¤o)é1£¬²¢ÇÒʹÄÜĞÅÌ(h¨¤o)ÊÇ1£¬ÄÇôÈıO¹ÜQ1ºÍQ4§(d¨£o)ͨ£¬ëÁ÷Ä×óÖÁÓÒÁ÷½(j¨©ng)ëC(j¨©)£¬ÈçD6 Ëùʾ£»Èç¹ûDIR£LĞÅÌ(h¨¤o)×?y¨u)?£¬¶øDIR£RĞÅÌ(h¨¤o)×?y¨u)?¡£ÄÇôQ2ºÍQ3¢§(d¨£o)ͨ£¬ëÁ÷t·´ÏòÁ÷ß^(gu¨°)ëC(j¨©)¡£
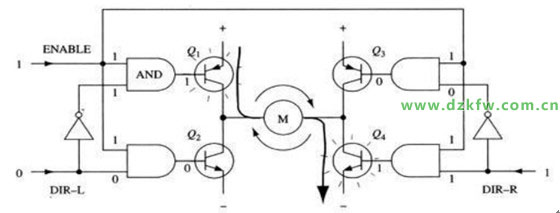
D11 ò(q¨±)Ó(d¨°ng)ëC(j¨©)ŞD(zhu¨£n)Ó(d¨°ng)r(sh¨ª)µÄĞÅÌ(h¨¤o)ʾÒâD
4¡¢ò(q¨±)Ó(d¨°ng)оƬßxñr(sh¨ª)¿¼]µÄ(w¨¨n)î}
Hòë·ëmÈ»ÓĞÖøÔS¶àµÄ(y¨u)üc(di¨£n)£¬µ«ÊÇÔÚ(sh¨ª)ëHµÄÖÆ×÷ß^(gu¨°)³ÌÖĞ£¬ÓÉÓÚÔª¼şİ^¶à£¬ë·ºÍ´î½¨Ò²İ^éÂé©£¬Ôö¼ÓÁËÓ²¼şÔO(sh¨¨)Ó(j¨¬)µÄÍ(f¨´)ës¶È¡£Ëù½^´ó¶àµ(sh¨´)ÖÆ×÷ÖĞͨ³£Ö±½ÓßxÓã(zhu¨¡n)ÓõÄò(q¨±)Ó(d¨°ng)оƬ¡£Ä¿Ç°ÊĞÃæÉÏ£(zhu¨¡n)ÓõÄò(q¨±)Ó(d¨°ng)оƬºÜ¶à£¬ÈçÉÏÃæÌáµ½µÄL298N¡¢BST7970¡¢MC33886µÈ£¬µ«µ½µ×ÎÒª(y¨©ng)ÔßxÓÃÄÄÔÛоƬÄØ£¬®(d¨¡ng)Ȼÿ·NоƬÓĞ×Ô¼ºµÄ(y¨u)İ(sh¨¬)£¬ÎÒª(y¨©ng)Ô¸ùş(j¨´)ÔO(sh¨¨)Ó(j¨¬)ĞèÒªÄr(ji¨¤)¸ñºÍĞÔÄÜÉϾCºÏ¿¼]²ÅĞĞ£¬ß@ÀïÕÈı(g¨¨)·½Ãæ¡£
1£©ò(q¨±)Ó(d¨°ng)ЧÂÊµÄŞD(zhu¨£n)»¯
ËùÖ^ò(q¨±)Ó(d¨°ng)ЧÂʸߣ¬¾ÍÊÇÒª¢İÈëµÄÄÜÁ¿±MÁ¿¶àµÄݳö½oØ(f¨´)İd£¬¶øò(q¨±)Ó(d¨°ng)ë·±¾Éí×îºÃ²»ÏûºÄ»òÉÙÏûºÄÄÜÁ¿£¬¾ßówµ½HòÉÏ£¬Ò²¾ÍÊÇ4(g¨¨)ò±ÛÔÚ§(d¨£o)ͨr(sh¨ª)×îºÃ](m¨¦i)Óк½µ£¬Ô½Ğ¡Ô½ºÃ¡£Äë·ÉÏ¿´£¬ß@Ö÷ҪȡQÓÚ¡°é_(k¨¡i)êP(gu¨¡n)¡±Éϵĺ½µ£¬ÆäÏûºÄéÁ÷ß^(gu¨°)µÄëÁ÷³ËÒÔº½µ£¬ëÁ÷´óĞ¡Ö÷ҪȡQÓÚØ(f¨´)İdëC(j¨©)µÄĞèÒª£¬ËùÒÔ¦(du¨¬)ÓÚÔO(sh¨¨)Ó(j¨¬)í(l¨¢i)Õf(shu¨)ÖØüc(di¨£n)ª(y¨©ng)¿¼]±MÁ¿pĞ¡é_(k¨¡i)êP(gu¨¡n)ÉϵÄë×èĶøÌá¸ßЧÂÊ£¬¶øÔÚßxÓÃò(q¨±)Ó(d¨°ng)оƬr(sh¨ª)ª(y¨©ng)®(d¨¡ng)¿¼]ËùßxÓõÄоƬº½µÊÇ·ñM(m¨£n)×ãëC(j¨©)ò(q¨±)Ó(d¨°ng)Á¦µÄĞèÒª£¬Ïñ ¢¼Óß^(gu¨°)ïw˼¿¨ ÖÇÄÜÜ(ch¨¥)µÄÅóÓѪ(y¨©ng)ÔÇå³ş£¬Ò»°ãºÜÉÙÓĞÈËßxñL298NоƬµÄ£¬¾¿ÆäÔÒò¾ÍÊÇ298NµÄ×ÔÉíº½µÌ«´óÔì³É¹¦ÂÊÏûºÄÌ«´ó¶ø²»M(m¨£n)×ãëC(j¨©)ò(q¨±)Ó(d¨°ng)ĞèÒªÔì³ÉµÄ¡£
2£©ÄÜòͨß^(gu¨°)µÄò(q¨±)Ó(d¨°ng)ëÁ÷
ÿ(g¨¨)оƬ¶¼ÓĞ×ÔÉí³ĞÊܵÄ×î´óëÁ÷£¬ÔÚÔO(sh¨¨)Ó(j¨¬)r(sh¨ª)ª(y¨©ng)±£×CëC(j¨©)µÄ¹¤×÷ëÁ÷²»ş(hu¨¬)Ôì³ÉоƬµÄı§£¬ÏñÖÇÄÜÜ(ch¨¥)ÖÆ×÷ß^(gu¨°)³ÌÖĞ£¬ëC(j¨©)µÄëÁ÷¿ÉÒÔß_(d¨¢)µ½4£5A£¬¶øL298×î´ó³ĞÊܵÄëÁ÷²»Äܳ¬ß^(gu¨°)2A£¬ËùÒÔß@Ò²ÊÇÒ»°ã²»²ÉÓÃ298N×÷éò(q¨±)Ó(d¨°ng)оƬµÄÁíÒ»(g¨¨)ÔÒò¡£
3£©Ğ¾Æ¬µÄr(ji¨¤)¸ñ
¦(du¨¬)ÓÚÆ÷¼şµÄr(ji¨¤)¸ñ£¬Ò»°ãÔÚI(y¨¨)ÓàµÄÖÆ×÷»ù±¾²»ş(hu¨¬)¿¼]Ì«¶à£¬µ«ÕæÕıÔÚ®a(ch¨£n)Æ·µÄÔO(sh¨¨)Ó(j¨¬)ÖĞ£¬r(ji¨¤)¸ñ sÊdzıÁËĞÔÄÜÍâ±Øí¿¼]µÄÁíÒ»(g¨¨)êP(gu¨¡n)æIÒòËØ£¬ÏñÉÏÃæÌáµ½ÁËL298NÓÉÓÚ×ÔÉíº½µÌ«´ó£¬Ëù³ĞÊܵÄëÁ÷Ì«ÉÙ£¬ËùÒÔ²»M(m¨£n)×ãÖÇÄÜÜ(ch¨¥)ëC(j¨©)µÄĞèÒª£¬ËùÒÔÓеÄÅóÓÑş(hu¨¬)Õf(shu¨)£¬298NоƬ²»ºÃ£¬²»ÄÜÕf(shu¨)²»ºÃ£¬ÒªÖªµÀÄr(ji¨¤)¸ñÉÏ7970ÊÇ298µÄ3±¶Ö®¶à£¬Ïñ×öÒ»°ãËٶȱÈİ^µÍµÄC(j¨©)Æ÷ÈË£¬298оƬÍêÈ«ÄÜòM(m¨£n)×ãÒªÇó¡£
¾CÉÏËùÊö£¬ÔÚßxñò(q¨±)Ó(d¨°ng)оƬª(y¨©ng)Är(ji¨¤)¸ñ¡¢ò(q¨±)Ó(d¨°ng)ëÁ÷¼°º½µµÈ·½Ãæ½oºÏ¿¼]¡£
5¡¢L298оƬ¼°ò(q¨±)Ó(d¨°ng)Ä£K
L298NÈ(n¨¨i)²¿µÄ½M³ÉÆä¾ÍÊÇÉÏÃæÖvµÄHòò(q¨±)Ó(d¨°ng)ë·£¬ËùÒÔ¹¤×÷ÔÀíÎÒÒÔÉϽé½BµÄHòÏàͬ£¬ß@ÀïÎÒ²»ÔÚ¢Êö£¬ÔÚʹÓÃr(sh¨ª)ÖØüc(di¨£n)ÒªÁ˽âÆäÒıÄ_µÄ¹¦ÄܺÍÖ÷ÒªµÄĞÔÄÜ ¢µ(sh¨´)¡£ÒıÄ_DÈçD12Ëùʾ¡£
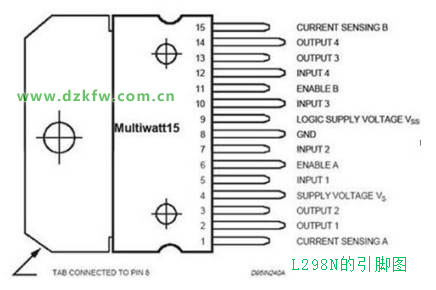
D12 L298NµÄÒıÄ_D
L298NÊÇST¹«Ë¾Éú®a(ch¨£n)µÄÒ»·N¸ß뺣¬´óëÁ÷µÄëC(j¨©)ò(q¨±)Ó(d¨°ng)оƬ¡£ÔоƬ²ÉÓÃ15Ä_·âÑb¡£Ö÷ÒªÌØüc(di¨£n)ÊÇ£º¹¤×÷뺸ߣ¬×î¸ß¹¤×÷뺿Éß_(d¨¢)46V£¬İ³öëÁ÷´ó£¬Ë²ég·åÖµ¿Éß_(d¨¢)3A£¬³ÖÀm(x¨´)¹¤×÷ëÁ÷é2A£»î~¶¨¹¦ÂÊé25W¡£È(n¨¨i)º¬É(g¨¨)HòµÄ¸ß뺴óëÁ÷È«òʽò(q¨±)Ó(d¨°ng)Æ÷£¬¿ÉÒÔÓÃí(l¨¢i)ò(q¨±)Ó(d¨°ng)Ö±Á÷ëC(j¨©)ºÍ²½ßM(j¨¬n)ëC(j¨©)¡¢À^ëÆ÷¾(xi¨¤n)ȦµÈ¸ĞĞÔØ(f¨´)İd£»²ÉÓÃË(bi¨¡o)Ê(zh¨³n)ßİëƽĞÅÌ(h¨¤o)¿ØÖÆ£»¾ßÓĞÉ(g¨¨)ÓÿØÖƶˣ¬ÔÚ²»ÊÜİÈëĞÅÌ(h¨¤o)Ó°íµÄÇérÏÂÔÊÔS»ò½ûÖ¹Æ÷¼ş¹¤×÷ÓĞÒ»(g¨¨)ßİëÔ´İÈë¶Ë£¬Ê¹È(n¨¨i)²¿ßİë·²¿·ÖÔÚµÍëºÏ¹¤×÷£»¿ÉÒÔÍâ½Ózy(c¨¨)ë×裬¢×»¯Á¿·´ğ½o¿ØÖÆë·¡£Ê¹ÓÃL298NоƬò(q¨±)Ó(d¨°ng)ëC(j¨©)£¬ÔоƬ¿ÉÒÔò(q¨±)Ó(d¨°ng)Ò»Å_(t¨¢i)ÉÏಽßM(j¨¬n)ëC(j¨©)ºÍËÄÏಽßM(j¨¬n)ëC(j¨©)£¬Ò²¿ÉÒÔ?x¨²n)ÉÅ_(t¨¢i)Ö±Á÷ëC(j¨©)¡£L298NÄ£KµÄò(q¨±)Ó(d¨°ng)ë·DÈçD13Ëùʾ¡£

D13 L298Në·D
¦(du¨¬)ÓÚÒÔÉÏë·DÓĞÒÔÏÂ×üc(di¨£n)Õf(shu¨)Ã÷£º
1£©ë·DÖĞÓĞÉ(g¨¨)ëÁ÷£¬Ò»Â·éL(zh¨£ng)298¹¤×÷ĞèÒªµÄ5VëÔ´VCC£¬Ò»Â·éò(q¨±)Ó(d¨°ng)ëC(j¨©)ÓõÄë³ØëÔ´VSS¡£
2£©1Ä_ºÍ15Ä_ÓеÄë·ÔÚÖĞég´®½ÓÁË´ó¹¦ÂʵÄë×裬¿ÉÒÔ²»¼Ó
3£©°Ë(g¨¨)Àm(x¨´)Á÷¶şO¹ÜÊÇéÁËÏû³ıëC(j¨©)ŞD(zhu¨£n)Ó(d¨°ng)r(sh¨ª)µÄ¼â·å뺱£×o(h¨´)ëC(j¨©)¶øÔO(sh¨¨)Ó(j¨¬)£¬º(ji¨£n)»¯ë·¿ÉÒÔ²»¼Ó¡£
4£©6Ä_ºÍ11Ä_éÉ·ëC(j¨©)ͨµÀµÄʹÄÜé_(k¨¡i)êP(gu¨¡n)£¬¸ßëƽʹÄÜËùÒÔ¿ÉÒÔÖ±½Ó½Ó¸ßëƽ£¬Ò²¿ÉÒÔ½»ÓÉÎƬC(j¨©)¿ØÖÆ¡£
5£©ÓÉÓÚ¹¤×÷r(sh¨ª)L298µÄ¹¦ÂÊİ^´ó£¬¿ÉÒÔßm®(d¨¡ng)¼ÓÑbÉ¢áƬ¡£
L298Ä£KµÄµÄÍâĞÎDÈçD14Ëùʾ£º
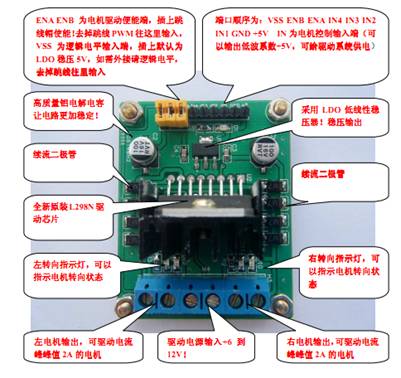
D14 L298NÄ£KÍâĞÎD
6¡¢ëC(j¨©)Õı·´ŞD(zhu¨£n)³ÌĞò
ÏÂÃæ(xi¨§)Ò»(g¨¨)³ÌĞò×Ğ¡Ü(ch¨¥)ÉÏÒ»(g¨¨)ëC(j¨©)ÕıŞD(zhu¨£n)¡£
#include<reg52.h>
#define uint unsigned int
#define uchar unsigned char
sbit PWM1=P2^0;//½ÓIN1 ¿ØÖÆÕıŞD(zhu¨£n)
sbit PWM2=P2^1;//½ÓIN2 ¿ØÖÆ·´ŞD(zhu¨£n)
void main()
{
while(1)
{
PWM1=1;
PWM2=0;
}
}
ÏÂÃæ(xi¨§)Ò»(g¨¨)³ÌĞò×Ğ¡Ü(ch¨¥)ÉÏÉ(g¨¨)(g¨¨)ëC(j¨©)ÕıŞD(zhu¨£n)£¬(sh¨ª)¬F(xi¨¤n)Ğ¡Ü(ch¨¥)µÄÇ°ĞĞ¡£
#include<reg52.h>
#define uint unsigned int
#define uchar unsigned char
sbit PWM1=P2^0;//½ÓIN1 ¿ØÖÆÕıŞD(zhu¨£n)
sbit PWM2=P2^1;//½ÓIN2 ¿ØÖÆ·´ŞD(zhu¨£n)
sbit PWM3=P2^2;//½ÓIN1 ¿ØÖÆÕıŞD(zhu¨£n)
sbit PWM4=P2^3;//½ÓIN2 ¿ØÖÆ·´ŞD(zhu¨£n)
sbit PWM5=P2^4;//½ÓIN1 ¿ØÖÆÕıŞD(zhu¨£n)
sbit PWM6=P2^5;//½ÓIN2 ¿ØÖÆ·´ŞD(zhu¨£n)
sbit PWM7=P2^6;//½ÓIN1 ¿ØÖÆÕıŞD(zhu¨£n)
sbit PWM8=P2^7;//½ÓIN2 ¿ØÖÆ·´ŞD(zhu¨£n)
void main()
{
while(1)
{
PWM1=1;
PWM2=0;
PWM3=1;
PWM4=0;
PWM5=1;
PWM6=0;
PWM7=1;
PWM8=0;
}
}
void delay(uint z)
{
uint x,y;
for(x=z;x>0;x--)
for(y=500;y>0;y--);
}
7¡¢ëpëC(j¨©)²îËÙŞD(zhu¨£n)ÏòµÄÔÀí
ZN-1AÖÇÄÜĞ¡Ü(ch¨¥)ÓĞÉ·NŞD(zhu¨£n)ÏòµÄ·½Ê½£¬²îËÙŞD(zhu¨£n)ÏòºÍ¶æC(j¨©)ŞD(zhu¨£n)Ïò¡£ÓÉÓÚ²îËÙŞD(zhu¨£n)ÏòÄ¿Ç°ÊĞÃæÉϵÄÙYÁϺÍÏàêP(gu¨¡n)³ÌĞò±Èİ^¶à£¬ËùÒÔ±¾½Ì³Ì½^´ó²¿·Ö³ÌĞò²ÉÓúóİò(q¨±)Ó(d¨°ng)£¬Ç°İ¶æC(j¨©)(sh¨ª)¬F(xi¨¤n)ŞD(zhu¨£n)ÏòµÄ¿ØÖÆ·½Ê½¡£ß@Àïº(ji¨£n)Òª½é½BһϲîËÙŞD(zhu¨£n)ÏòµÄÔÀí¼°·½·¨£¬²¢½o³öÒ»(g¨¨)º(ji¨£n)εijÌĞò£¬¸üÍ(f¨´)ësµÄ³ÌĞòÕ(q¨«ng)´ó¼Ò ¢¿¼ÏàêP(gu¨¡n)µÄÙYÁÏ£¬Èç¿ÉÒÔÀûÓÃZN-1AÖÇÄÜĞ¡Ü(ch¨¥)(sh¨ª)¬F(xi¨¤n)Ğ¡Ü(ch¨¥)µÄÖ±Á¢ß\(y¨´n)Ó(d¨°ng)£¬¼´ÉİÖ±Á¢Ç°ĞĞ£¬Ä¿Ç°ÊÀ½çÉϱÈİ^ïL(f¨¥ng)ĞеÄÉİÖ±´ú²½Ü(ch¨¥)¾ÍÊÇÀûÓÃß@·NĞÎʽ(sh¨ª)¬F(xi¨¤n)£¬²»ß^(gu¨°)ÒªÒª×öÉİÖ±Á¢r(sh¨ª)Éæ¼°µ½Æ½ºâµÄ(w¨¨n)î}£¬Ğè¦(du¨¬)¼ÓËÙ¶ÈÓ(j¨¬)ºÍÍÓÂİxµÄÖªµÀÓĞËùÁ˽⣬ÓĞÅdȤ ÅóÓÑ¿ÉÒÔÀûÓñ¾Ğ¡Ü(ch¨¥)(sh¨ª)¬F(xi¨¤n)Ö±Á¢µÄ¹¦ÄÜ£¬ß@Àï²»¶à×÷½é½B¡£
ËùÖ^µÄ²îËÙ£¬ÊÇÖ¸×óÓÒÉÜ(ch¨¥)ݵÄËٶȲ¼ÙÈç×óß Ü(ch¨¥)ݱÈÓÒß µÄ¿ì£¬tĞ¡Ü(ch¨¥)ş(hu¨¬)Æ«ÏòÓÒ¡£Í¬r(sh¨ª)£¬×óµÄµÄÜ(ch¨¥)İŞD(zhu¨£n)ËÙ±ÈÓÒµÄÂı£¬ÄÇôСÜ(ch¨¥)ş(hu¨¬)Ïò×óß ŞD(zhu¨£n)Ó(d¨°ng)¡£Ä¿Ç°Ö÷ÒªÓĞÒÔÏÂÉ·N·½Ê½¡£
£¨1£©Ğ¡Ü(ch¨¥)Ïò×óŞD(zhu¨£n)£¬¿ÉÊÇÊÇ×óİÍ£Ö¹£¬×óİÀ^Àm(x¨´)ŞD(zhu¨£n)Ó(d¨°ng)£¬ß@Ó¿É(sh¨ª)¬F(xi¨¤n)×óŞD(zhu¨£n)£¬ß@·N·½Ê½(sh¨ª)¬F(xi¨¤n)Ğ¡½Ç¶ÈµÄŞD(zhu¨£n)£¬ÔڽǶȲ»´ór(sh¨ª)¿É²ÉÓô˷N·½Ê½¡£
£¨2£©Ğ¡Ü(ch¨¥)Ïò×óŞD(zhu¨£n)£¬¿ÉÒÔÊÇ×óİ·´ŞD(zhu¨£n)£¬ÓÒİÕıŞD(zhu¨£n)£¬ß@Ó¿ÉÒÔ(sh¨ª)¬F(xi¨¤n)´ó½Ç¶ÈµÄ×óŞD(zhu¨£n)£¬ÉõÖÁ¿ÉÒÔßM(j¨¬n)ĞĞԵشòŞD(zhu¨£n)¡£
ͬÀí¿ÉÍƳöĞ¡Ü(ch¨¥)ÈçºÎÏòÓÒŞD(zhu¨£n)Ïò¡£
ÏÂÃæ½o³öÒ»(g¨¨)ÀûÓúóİëC(j¨©)²îÊÂß\(y¨´n)Ó(d¨°ng)(sh¨ª)¬F(xi¨¤n)Ğ¡Ü(ch¨¥)ԵشòŞD(zhu¨£n)µÄ³ÌĞò¡£
8¡¢ÀûÓòîËÙ(sh¨ª)¬F(xi¨¤n)Ğ¡ÔԵشòŞD(zhu¨£n)³ÌĞò
 ·µ»Øí²¿
·µ»Øí²¿ Ë¢ĞÂí(y¨¨)Ãæ
Ë¢ĞÂí(y¨¨)Ãæ ϵ½í(y¨¨)µ×
ϵ½í(y¨¨)µ×