
Å─¼F(xi©żn)į┌ķ_╩╝Ż¼╬ęéāīóķ_š╣ę╗ą®ArduinoĄ─ų¬ūR(sh©¬)īW(xu©”)┴Ģ(x©¬)Ż¼╩ūŽ╚╬ęéāüĒ蹊┐ArduinoĄ─│╠ą“ĮY(ji©”)śŗ(g©░u)Ż¼═©▀^▒Š╬─Ą─īW(xu©”)┴Ģ(x©¬)Ż¼┐╔ęį┴╦ĮŌĖ³ČÓArduino╩└Įńųą╩╣ė├Ą─ą┬ąg(sh©┤)šZĪŻėøūĪ╬ęéāĄ─Arduino▄ø╝■╩Ūķ_į┤Ą─Ż¼Java environmentĄ─į┤┤·┤aū±čŁGPLŻ¼C/ C++╬ó┐žųŲŲ„Äņū±čŁLGPLĪŻ

Sketch Ī¬ Ą┌ę╗éĆ(g©©)ą┬ąg(sh©┤)šZ╩ŪArduino│╠ą“Ī░sketchĪ▒ĪŻŻ©ČÓĘŁūg×ķ▓▌łDŻ®
│╠ą“ĮY(ji©”)śŗ(g©░u)Ż©StructureŻ®
Arduino│╠ą“ų„ę¬Ęų×ķ╚²éĆ(g©©)▓┐Ęų: ĮY(ji©”)śŗ(g©░u)Ż©StructureŻ®ĪóųĄ(ūā┴┐║═│Ż┴┐)║═║»öĄ(sh©┤)ĪŻĮėŽ┬üĒ╬ęéāīóų▓Į═©▀^╩╣ė├Arduino IDE│╠ą“üĒ┴╦ĮŌ╚ń║╬ŠÄīæø]ėąšZĘ©╗“ŠÄūgÕe(cu©░)š`Ą─│╠ą“ĪŻ
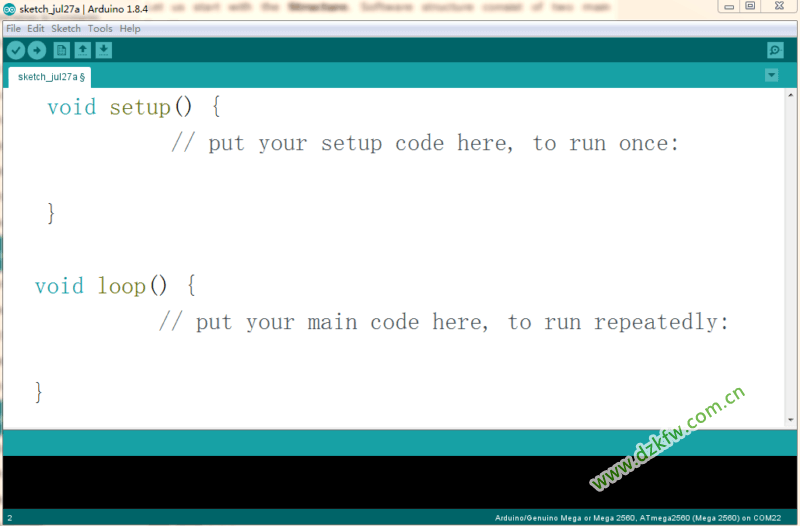
╬ęéā╩ūŽ╚Å─ĮY(ji©”)śŗ(g©░u)Ż©StructureŻ®ķ_╩╝ĪŻ▄ø╝■ĮY(ji©”)śŗ(g©░u)░³└©ā╔éĆ(g©©)ų„ę¬║»öĄ(sh©┤)Ż¼«ö(d©Īng)╬ęéā┤“ķ_Arduino IDE│╠ą“Ż¼ą┬Į©ę╗éĆ(g©©)sketchĢr(sh©¬)Ż¼┤░┐┌Ģ■(hu©¼)─¼šJ(r©©n)Įoą┬sketch╠Ē╝ėā╔éĆ(g©©)║»öĄ(sh©┤)Ż¼Ęųäe×ķ setup() ║═ loop() Ż¼╦³éāĄ─Š▀¾w╣”─▄╚ńŽ┬Ż║
Setup( )║»öĄ(sh©┤)Ż║ setup()║»öĄ(sh©┤)į┌sketchķ_╩╝▀\(y©┤n)ąąĢr(sh©¬)š{(di©żo)ė├Ż¼╩╣ė├╦³┐╔ęį═Ļ│╔│§╩╝╗»ūā┴┐Ż¼pinModeįO(sh©©)Č©Ż¼Äņ╬─╝■ę²╚ļĄ╚Ą╚▓┘ū„ĪŻ═©│ŻŪķørŽ┬Ż¼├┐┤╬ķ_ÖC(j©®)╗“Å═(f©┤)╬╗Arduinoķ_░l(f©Ī)░Õ║¾Ż¼setup ( ) ║»öĄ(sh©┤)ų╗Ģ■(hu©¼)▀\(y©┤n)ąąę╗┤╬ĪŻ╚ńŻ║
void setup()
{
servo_test.attach(8); // ȵÖC(j©®)ą┼╠¢(h©żo)─_8
pinMode(8, OUTPUT);
}
į┌setup()║»öĄ(sh©┤)ųąįO(sh©©)ȩȵÖC(j©®)┐žųŲą┼╠¢(h©żo)ę²─_×ķ8Ż¼pinMode 8─_×ķ▌ö│÷ę²─_ĪŻį┤┤·┤aęŖŻ║ųŲū„īÖ╬’ūįäė(d©░ng)╬╣╩│Ų„
Loop( )║»öĄ(sh©┤)Ż║▀\(y©┤n)ąą═Ļsetup()║»öĄ(sh©┤)║¾Ż¼│╠ą“Ģ■(hu©¼)裣h(hu©ón)▀\(y©┤n)ąą loop() ║»öĄ(sh©┤)ųąĄ─ā╚(n©©i)╚▌Ż¼Loop()║»öĄ(sh©┤)┐╔ęįįO(sh©©)ų├│§╩╝ųĄŻ¼╦³Š½┤_Ąž▀B└m(x©┤)裣h(hu©ón)ł╠(zh©¬)ąą╝╚Č©▓┘ū„Ż¼Loop└’├µĄ─┤·┤a╩Ū┐žųŲArduino░Õ╚ń║╬╣żū„Ą─Š½╦ĶĪŻ╚ńŻ║
void loop() {
// į┌įń╔Ž6³c(di©Żn):
servo_test.write(80); //ȵÖC(j©®)ą²▐D(zhu©Żn)80Č╚Ż¼┤“ķ_│÷┐┌
delay(60000); //│÷┐┌Ą─┤“ķ_│ų└m(x©┤)Ģr(sh©¬)ķg
servo_test.write(0); // ĻP(gu©Īn)ķ]
delay(25200000UL); //7ąĪĢr(sh©¬)║¾į┘┤╬┤“ķ_│÷┐┌
//Ž┬╬ń1³c(di©Żn):
servo_test.write(80); //ȵÖC(j©®)ą²▐D(zhu©Żn)80Č╚Ż¼┤“ķ_│÷┐┌
delay(60000); //│÷┐┌Ą─┤“ķ_│ų└m(x©┤)Ģr(sh©¬)ķg
servo_test.write(0); // ĻP(gu©Īn)ķ]
delay(25200000UL); //7ąĪĢr(sh©¬)║¾į┘┤╬┤“ķ_│÷┐┌
// ═Ē╔Ž8³c(di©Żn):
servo_test.write(80);
delay(60000);
servo_test.write(0);
delay(36000000UL); //10ąĪĢr(sh©¬)║¾į┘┤╬┤“ķ_│÷┐┌
}
ę▓Š═╩ŪšfŻ¼š¹éĆ(g©©)┤·┤aųąŻ¼╬ęéā┐╔ęįīóloop└’├µĄ─ā╚(n©©i)╚▌└ĒĮŌ×ķŻ¼loop╩Ū╬ęéāŽŻ═¹Arduinoį§├┤Ę┤Å═(f©┤)╚ź═Ļ│╔╣żū„Ą─Š▀¾wś╦(bi©Īo)£╩(zh©│n)║═ę¬Ū¾ĪŻ
ArduinoĄ─ų„ę¬│╠ą“ĮY(ji©”)śŗ(g©░u)Š═╩Ū▀@śėŻ¼╩Ū▓╗╩Ū║▄║åå╬ŻĪŽ┬ę╗š┬īóĮķĮBArduinoĄ─öĄ(sh©┤)ō■(j©┤)ŅÉą═ĪŻ
īŻŅ}Ż║Arduino╗∙ĄA(ch©│)Į╠│╠Ż║
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū