
Įø▀^ę╗ų▄Ą─蹊┐Ż¼ī”┴∙ūįė╔Č╚ÖCąĄ▒█▀\äė▀Mąą┴╦蹊┐Ż¼└¹ė├Ė▀ųąÄū║╬ų¬ūR▀Mąą┴╦▀\äė┐žųŲ▓▀┬įĄ─įOėŗŻ¼¤oāöžĢ½I│÷į┤┤aŻ¼┐╔ęį×ķ╚ļķTĄ─ąĪ╗’░ķ╠ß╣®ę╗Č©Ą─ĮĶĶbĪŻ
1ĪóÖCąĄ▒█╬’└ĒģóöĄĄ─ĮķĮB
┘I┴╦ę╗éĆ┴∙▌SÖCąĄ▒█Ż¼ū„×ķ蹊┐ī”Ž¾Ż¼╚ń╣¹╩ŪŲõ╦³ÖCąĄ▒█Ż¼┐╔ęįĖ∙ō■ÖCąĄ▒█ģóöĄī”┤·┤a▀Mąąą▐Ė─ĪŻÖCąĄ▒█ģóöĄ╚ńŽ┬łD╦∙╩ŠŻ║
1.1 ▓┐╝■┼c│▀┤ń
ÖCąĄ▒█╚ńŽ┬▓┐╝■ĮM│╔Ż¼├Ķ╩÷╚ńŽ┬▒ĒŻ║
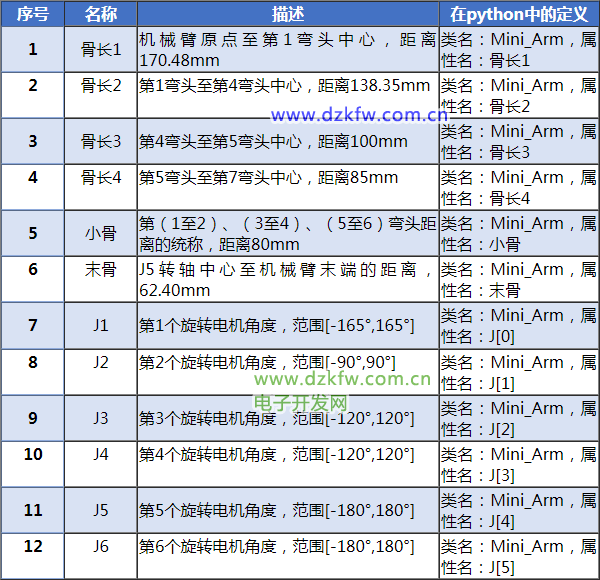
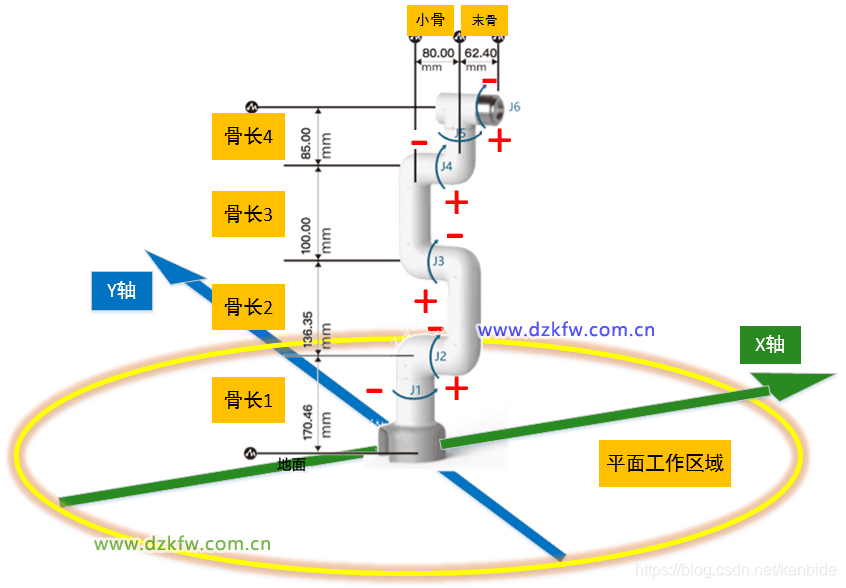
1.2ū°ś╦ŽĄ┼c╣żū„┐šķg
ÖCąĄ▒█ū°ś╦ŽĄ×ķöĄīWų▒ĮŪš²Į╗ū°ś╦ŽĄŻ¼├┐éĆļŖÖC└@ų°ą²▐D▌SĒśĢrßśĪó─µĢrßśą²▐DŻ©š²žōęčĮøś╦├„Ż®Ż¼ĘĮŽ“╚ńłD1╦∙╩ŠŻ¼ÖCąĄ▒█═©▀^6éĆļŖÖCĄ─ą²▐D▀\äėŻ¼īŹ¼F┴╦ę╗ŽĄ┴ąÅ═ļsĄ─äėū„ĪŻ
ūóęŌŻ¼ė╔ė┌ÖCąĄĮYśŗ║═įOėŗĄ─įŁę“Ż¼ėąĄ─ļŖÖC▓╗─▄▀Mąą-180ĪŃų┴180ĪŃĄ─╚½Ž“▐DäėŻ¼Ģ■ėąę╗éĆ▐DäėĄ─ĘČć·Ż©ęŖ╔Ž▒ĒŻ®Ż¼▀@▓┐Ęųø]ėąį┌pythonųąīŹ¼FĪŻ
2ĪóÖCąĄ▒█▀\äė┐žųŲįŁ└Ē
ÖCąĄ▒█▀\äė┐žųŲę¬ĮŌøQĄ─║╦ą─å¢Ņ}╩ŪŻ¼ų¬Ą└╬’¾wĄ─╬╗ų├Ż©ųąą─³cū°ś╦Ż®║═ų„ĘĮŽ“Ż©╬’¾wĄ─│»Ž“Ż®Ż¼│╠ą“ūįäėėŗ╦Ń│÷ÖCąĄ▒█Ą─Ė„ĻP╣ØĮŪČ╚╬╗ų├Ż¼īóŖAŠ▀£╩┤_╦═ĄĮūź╚Ī╬’¾wĄ─▓┐╬╗Ż¼▓óī”£╩ūź╚Ī╬╗ų├ĪŻ
2.1ÖCąĄ▒█▀\äėĄ─Äū║╬║å╗»
┐é¾w╦╝┬Ę╩ŪīóÖCąĄ▒█Ą─╚²ŠSÅ═ļs▀\äė║å╗»×ķā╔éĆŲĮ├µĄ─▀\äėŻ¼╝┤Ī░Ė®ęĢŲĮ├µĪ▒Ż¼║═Ī░┤╣ų▒ŲĮ├µŻ©▒Š╬─ĮąRŲĮ├µŻ®Ī▒Ą─ĮM║Ž▀\äėĪŻ╚ńŽ┬ā╔éĆłDŻ║
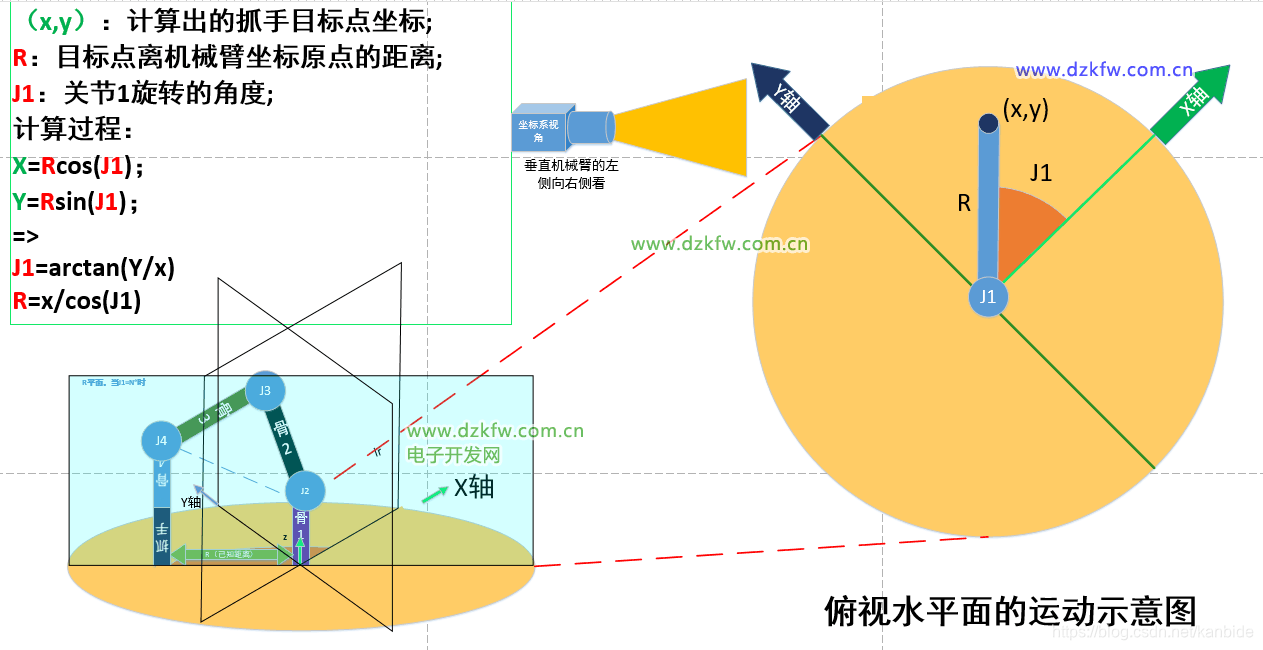
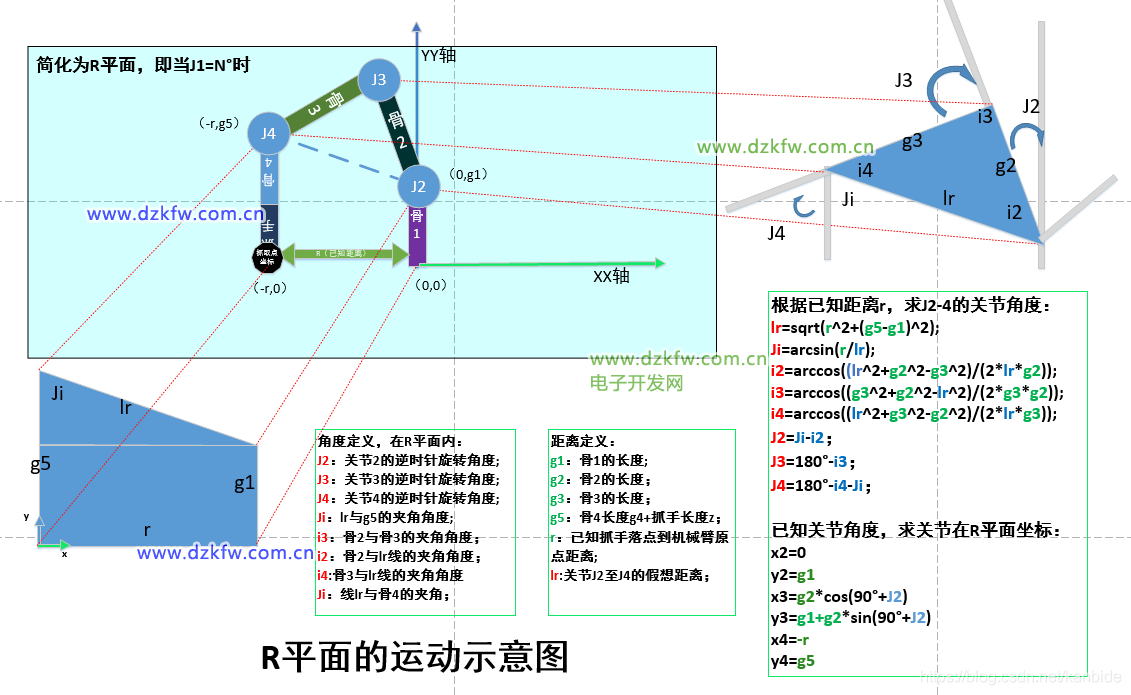
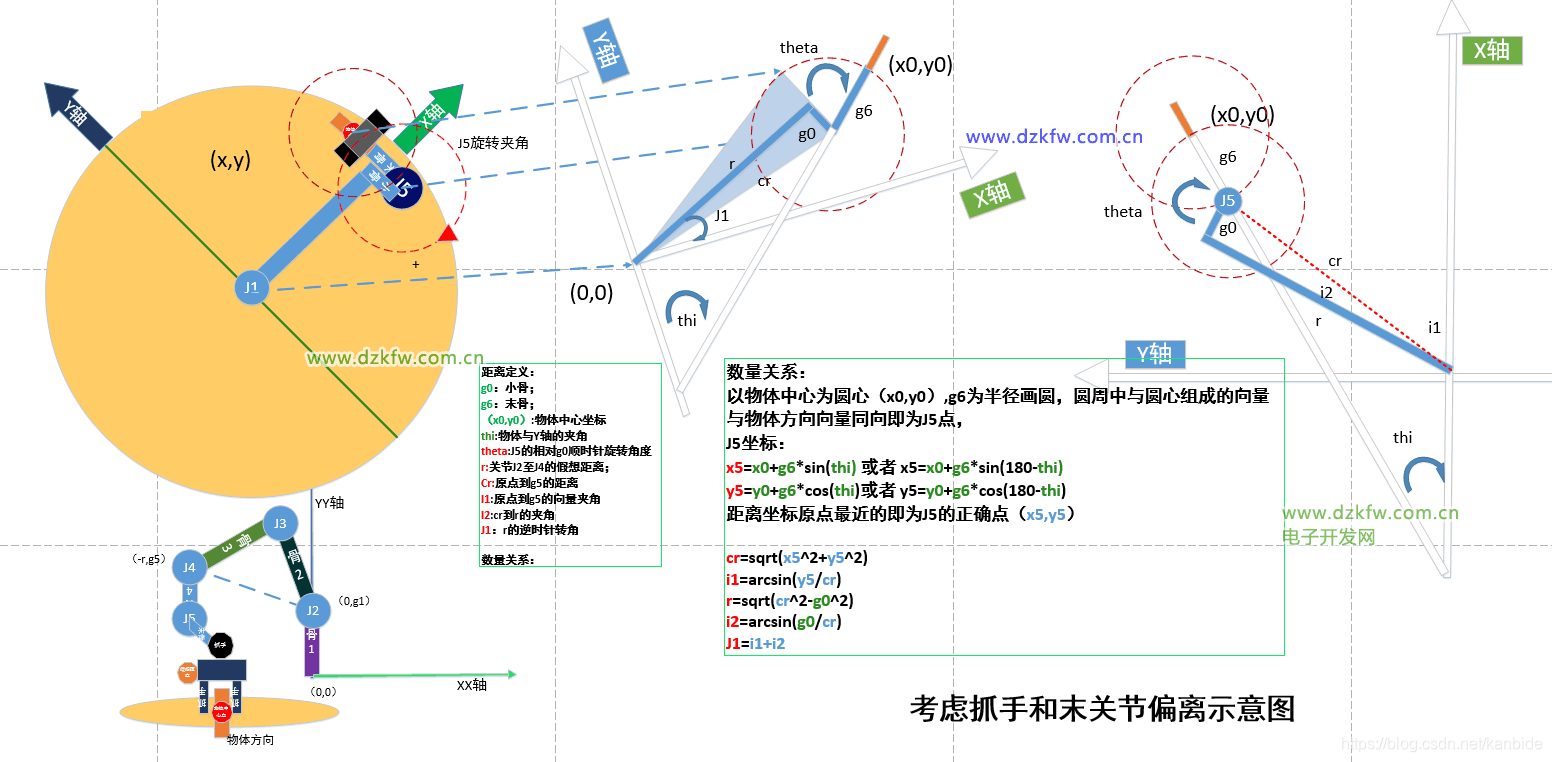
2.2ÖCąĄ▒█ūź╩ų╝┤║¾├µ─®ĻP╣ØĄ─╠Ä└Ē
Ųš═©Ą─ÖCąĄ▒█Ą─┐žųŲęį╔ŽŠ═┐╔ęįŻ¼ė╔ė┌╬ę╩ųŅ^▀@éĆ┤¾Ž¾ÖCąĄ▒█▒╚▌^╠ž╩ŌŻ¼ėą║▄ČÓ90Č╚ÅØŅ^Ż¼Č°Ūęūź╩ų░▓čb║¾Ż¼╦¹Ą─┬õ³c┼c╔Ž├µ║å╗»─Żą═Š═│÷¼F┴╦Ų½▓ŅŻ¼ę“┤╦Ż¼▀ĆąĶę¬Ė∙ō■▀@éĆ╠ž³cŻ¼Ė∙ō■īŹļHĄ─╬’¾wū°ś╦║═ų„ĘĮŽ“Ż¼ėŗ╦Ń│÷╔Ž╣ØĄ─└ĒŽļūź╩ųū°ś╦³cŻ©x,yŻ®Ż¼╚╗║¾Š═─▄Ū¾│÷╚½▓┐ĻP╣ØĄ─ĮŪČ╚┴╦ĪŻ
3Īópythonį┤┤a
ęįŽ┬╩Ūį┤┤·┤aŻ¼┐╔ęįų▒Įė▀\ąąŻ¼▒ŠšŠį┤┤aµ£ĮėŻ║ī”┴∙ūįė╔Č╚ÖCąĄ▒█Ą─▀\äė┐žųŲ╝░pythonīŹ¼FŻ©į┤┤aŻ®
╗“ĻPūó╬──®╣½▒Ŗ╠¢Ż¼├Ō┘M½@╚Ī
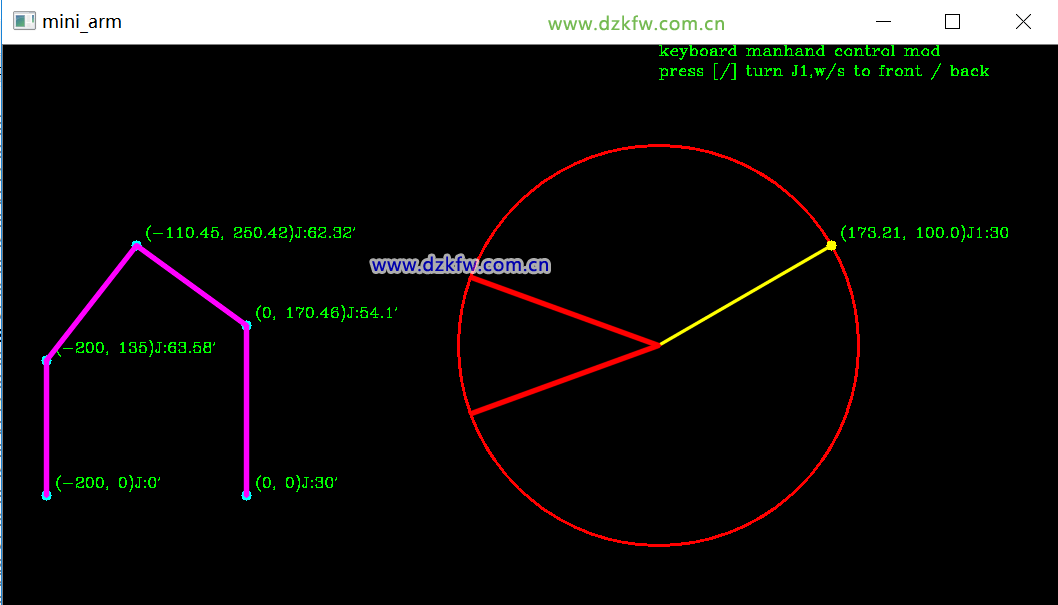
░┤µI▒P"O"µIŻ¼▀M╚ļūįäė╩¾ś╦³cō¶ėęé╚łDÖCąĄ▒█╣żū„░ļÅĮĘČć·Ą─ĄžĘĮŻ¼ūįäėėŗ╦ŃĖ„ĻP╣ØĄ─ą²▐Dū°ś╦ĪŻ
į┘░┤µI▒P"O"µIŻ¼═╦│÷╩¾ś╦³cō¶ėŗ╦Ń─Ż╩ĮŻ¼Ė─ė├▒O▒P╩ųäė▓┘ū„─Ż╩ĮŻ¼░┤Ī░[Ī▒╗“ Ī░]Ī▒Ż¼╩ŪJ1ĻP╣Øą²▐DŻ¼░┤Ī░w"╩ŪöU┤¾ū„śI░ļÅĮŻ¼░┤"s"╩Ū┐sąĪū„śI░ļÅĮĪŻ
▀\ąąą¦╣¹╚ńŽ┬Ż║
ęį╔Ž╩ŪÄū║╬īŹ¼FĪŻ
┴∙ūįė╔Č╚ÖCąĄ▒█Ą─▀\äė┐žųŲ╝░pythonīŹ¼F
www.www84811.com/hangye/UploadFiles_3492/202402/2024021416105679.zip
 ĘĄ╗žĒö▓┐
ĘĄ╗žĒö▓┐ ╦óą┬Ēō├µ
╦óą┬Ēō├µ Ž┬ĄĮĒōĄū
Ž┬ĄĮĒōĄū