
ÎïówÔÚŋÕégūßÓÐÁųŨÔÓÉķČĢŽžīŅØxĄĒyĄĒzČýÖą―ĮŨøËÝS·―ÏōĩÄŌÆÓŨÔÓÉķČšÍĀ@ß@ČýŨøËÝSĩÄÞDÓŨÔÓÉķČ ĄĢŌōīËĢŽŌŠÍęČŦī_ķĻÎïówĩÄÎŧÖÃĢŽūÍąØíĮåģþß@ÁųŨÔÓÉķČĄĢ
ÁųŨÔÓÉķČCÐĩąÛÔĀí
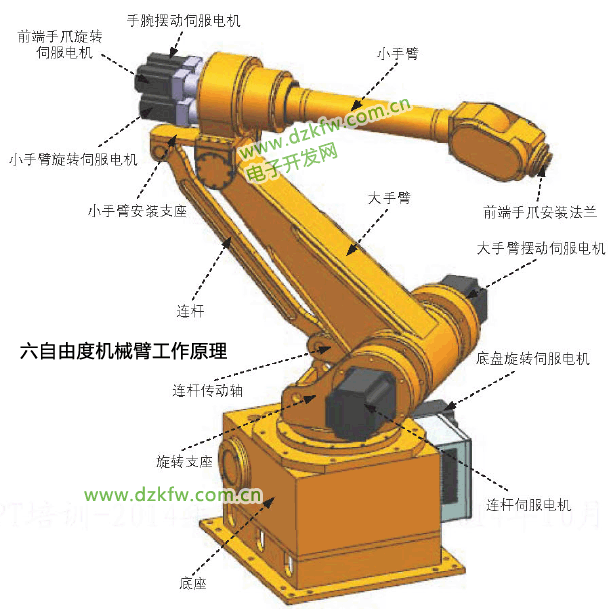
ČΚÎŌŧ]ÓÐĘÜžsĘøĩÄÎïówĢŽÔÚŋÕégūųūßÓÐ6ŠÁĒĩÄß\ÓĄĢ
ŌÔČįDËųĘūĩÄéL·―ÐÎéĀýĢŽËüÔÚÖą―ĮŨøËÏĩoxyzÖÐŋÉŌÔÓÐ3Æ―ŌÆß\ÓšÍ3ÞDÓĄĢ3Æ―ŌÆß\Ó·ÖeĘĮŅØx,y,zÝSĩÄÆ―ŌÆß\Ó,3ÞDÓ·ÖeĘĮĀ@x,y,zÝSĩÄÞDÓĄĢÁTÉÏ°ŅÉÏĘö6ŠÁĒß\Ó·QŨö6ŨÔÓÉķČĄĢ

ČįđûēÉČĄŌŧķĻĩÄžsĘøīëĘĐĢŽÏûģýÎïówĩÄ6ŨÔÓÉķČĢŽtÎïówąŧÍęČŦķĻÎŧĄĢČįÉÏDËųĘūĢŽēÉÓÃ6°īŌŧķĻŌtÔOÖÃĩÄÖ§ÎücĢŽžsĘøÎïów6ŨÔÓÉķČĩÄÔĀí·QéÁųücķĻÎŧÔĀíĄĢ
ÁųŨÔÓÉķČCÐĩąÛĘĮŌŧ·NķāđĶÄÜĩÄCÐĩÔOäĢŽËüÄÜōÔÚŌŧÆ―ÃæÉÏßMÐÐÁų·―ÏōĩÄŠÁĒß\ÓĄĢūßówíÕfĢŽÁųŨÔÓÉķČCÐĩąÛŋÉŌÔÔÚŌÔÏÂŨ·―ÏōÉÏß\ÓĢš
- ÉÏÏÂß\ÓĢĻŅØÖøZÝSĢĐĢšCÐĩąÛŋÉŌÔÄĩØÃæīđÖąĖáÆðĢŽŌēŋÉŌÔĒÆä·ÅÏÂÖÁĩØÃæĄĢ
- Į°šóß\ÓĢĻŅØÖøYÝSĢĐĢšCÐĩąÛŋÉŌÔÔÚËŪÆ―ÃæČĮ°šóŌÆÓĄĢ
- ŨóÓŌß\ÓĢĻŅØÖøXÝSĢĐĢšCÐĩąÛŋÉŌÔÔÚËŪÆ―ÃæČŨóÓŌŌÆÓĄĢ
- Ā@XÝSÐýÞDĢšCÐĩąÛŋÉŌÔÔÚŨÔÉíŋvÝSÉÏßMÐÐÐýÞDĄĢ
- Ā@YÝSÐýÞDĢšCÐĩąÛŋÉŌÔÔÚŨÔÉíMÝSÉÏßMÐÐÐýÞDĄĢ
- Ā@ZÝSÐýÞDĢšCÐĩąÛŋÉŌÔÔÚŨÔÉíØQÖąÝSÉÏßMÐÐÐýÞDĄĢ
éÁËŽFß@ÐĐß\ÓĢŽÁųŨÔÓÉķČCÐĩąÛÍĻģĢ°üĀĻķāŠÁĒĩÄęPđĢŽÃŋęPđķžÓÉëCšÍũÓŅbÖÃŋØÖÆĢŽÄÜōūŦī_ĩØŋØÖÆËŲķČšÍÁĶÁŋĄĢīËÍâĢŽCÐĩąÛĩÄŋØÖÆ·―Ę―ÖũŌŠÓÐé_hŋØÖÆšÍé]hŋØÖÆÉ·NĄĢé_hŋØÖÆĘĮÍĻß^îAÔOĩÄÜÛEšÍËŲķČíßMÐÐŋØÖÆĩÄĢŽķøé]hŋØÖÆtĘĮÍĻß^ũļÐÆũŦ@ČĄCÐĩąÛß\ÓĩÄ îB·īðĢŽČŧšóÍĻß^ŋØÖÆÆũßMÐÐÓËãšÍÕ{ÕûĢŽŌÔß_ĩ―ūŦī_ŋØÖÆĩÄÄŋĩÄĄĢ
 ·ĩŧØíēŋ
·ĩŧØíēŋ ËĒÐÂíÃæ
ËĒÐÂíÃæ ÏÂĩ―íĩŨ
ÏÂĩ―íĩŨ